agenticros 0.0.1 → 0.1.1
This diff represents the content of publicly available package versions that have been released to one of the supported registries. The information contained in this diff is provided for informational purposes only and reflects changes between package versions as they appear in their respective public registries.
- package/LICENSE +192 -0
- package/README.md +90 -4
- package/dist/commands/config.d.ts +20 -0
- package/dist/commands/config.d.ts.map +1 -0
- package/dist/commands/config.js +179 -0
- package/dist/commands/config.js.map +1 -0
- package/dist/commands/doctor.d.ts +33 -0
- package/dist/commands/doctor.d.ts.map +1 -0
- package/dist/commands/doctor.js +232 -0
- package/dist/commands/doctor.js.map +1 -0
- package/dist/commands/down.d.ts +15 -0
- package/dist/commands/down.d.ts.map +1 -0
- package/dist/commands/down.js +91 -0
- package/dist/commands/down.js.map +1 -0
- package/dist/commands/init.d.ts +21 -0
- package/dist/commands/init.d.ts.map +1 -0
- package/dist/commands/init.js +259 -0
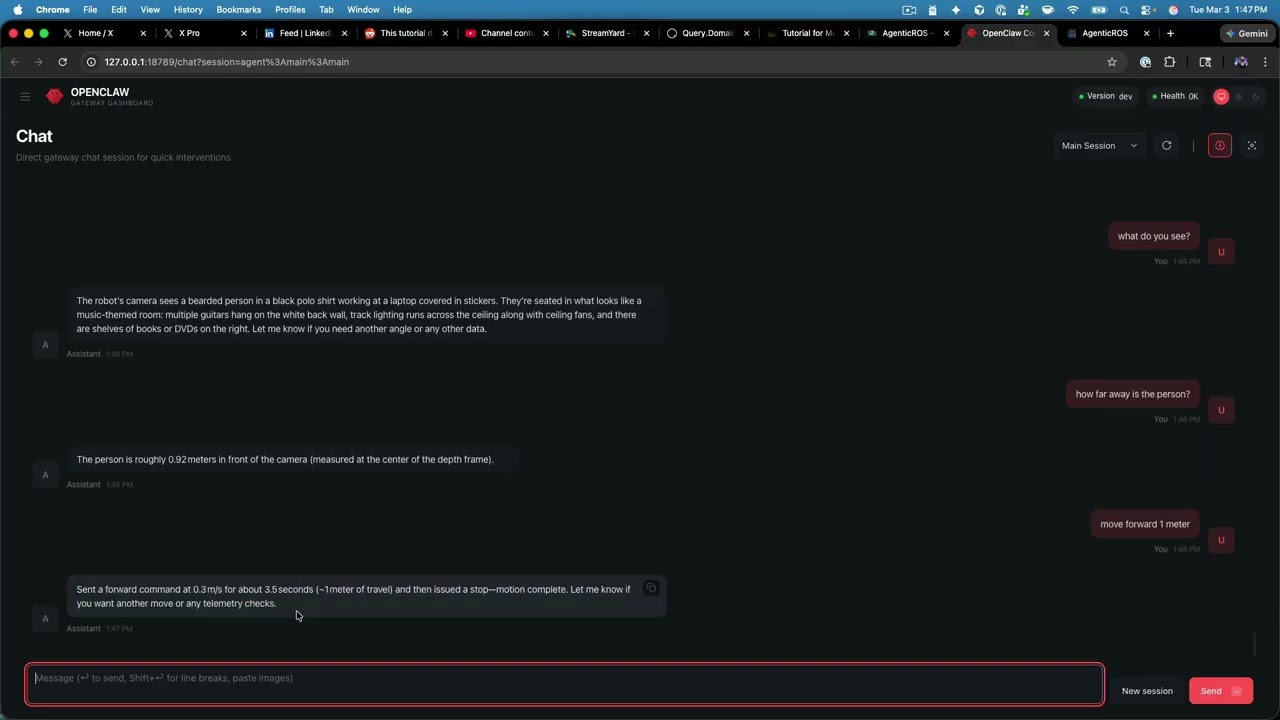
- package/dist/commands/init.js.map +1 -0
- package/dist/commands/logs.d.ts +18 -0
- package/dist/commands/logs.d.ts.map +1 -0
- package/dist/commands/logs.js +67 -0
- package/dist/commands/logs.js.map +1 -0
- package/dist/commands/status.d.ts +12 -0
- package/dist/commands/status.d.ts.map +1 -0
- package/dist/commands/status.js +56 -0
- package/dist/commands/status.js.map +1 -0
- package/dist/commands/up.d.ts +20 -0
- package/dist/commands/up.d.ts.map +1 -0
- package/dist/commands/up.js +70 -0
- package/dist/commands/up.js.map +1 -0
- package/dist/index.d.ts +12 -0
- package/dist/index.d.ts.map +1 -0
- package/dist/index.js +107 -0
- package/dist/index.js.map +1 -0
- package/dist/menu.d.ts +9 -0
- package/dist/menu.d.ts.map +1 -0
- package/dist/menu.js +96 -0
- package/dist/menu.js.map +1 -0
- package/dist/runners/real-robot.d.ts +15 -0
- package/dist/runners/real-robot.d.ts.map +1 -0
- package/dist/runners/real-robot.js +46 -0
- package/dist/runners/real-robot.js.map +1 -0
- package/dist/runners/sim.d.ts +19 -0
- package/dist/runners/sim.d.ts.map +1 -0
- package/dist/runners/sim.js +53 -0
- package/dist/runners/sim.js.map +1 -0
- package/dist/util/env.d.ts +24 -0
- package/dist/util/env.d.ts.map +1 -0
- package/dist/util/env.js +53 -0
- package/dist/util/env.js.map +1 -0
- package/dist/util/logger.d.ts +24 -0
- package/dist/util/logger.d.ts.map +1 -0
- package/dist/util/logger.js +62 -0
- package/dist/util/logger.js.map +1 -0
- package/dist/util/paths.d.ts +57 -0
- package/dist/util/paths.d.ts.map +1 -0
- package/dist/util/paths.js +132 -0
- package/dist/util/paths.js.map +1 -0
- package/dist/util/pidfile.d.ts +16 -0
- package/dist/util/pidfile.d.ts.map +1 -0
- package/dist/util/pidfile.js +63 -0
- package/dist/util/pidfile.js.map +1 -0
- package/dist/util/state.d.ts +26 -0
- package/dist/util/state.d.ts.map +1 -0
- package/dist/util/state.js +55 -0
- package/dist/util/state.js.map +1 -0
- package/package.json +60 -1
- package/runtime/BUNDLE.json +11 -0
- package/runtime/LICENSE +192 -0
- package/runtime/README.md +273 -0
- package/runtime/docs/architecture.md +366 -0
- package/runtime/docs/cli.md +140 -0
- package/runtime/docs/memory.md +292 -0
- package/runtime/docs/robot-setup.md +347 -0
- package/runtime/package.json +28 -0
- package/runtime/packages/agenticros/agenticros-agenticros-0.0.1.tgz +0 -0
- package/runtime/packages/agenticros/openclaw.plugin.json +451 -0
- package/runtime/packages/agenticros/package.json +41 -0
- package/runtime/packages/agenticros/src/camera-snapshot-cache.ts +59 -0
- package/runtime/packages/agenticros/src/camera-snapshot-routes.ts +44 -0
- package/runtime/packages/agenticros/src/commands/estop.ts +41 -0
- package/runtime/packages/agenticros/src/commands/transport.ts +195 -0
- package/runtime/packages/agenticros/src/config-file.ts +136 -0
- package/runtime/packages/agenticros/src/config-page.ts +498 -0
- package/runtime/packages/agenticros/src/context/robot-context.ts +373 -0
- package/runtime/packages/agenticros/src/depth.ts +313 -0
- package/runtime/packages/agenticros/src/describer.ts +157 -0
- package/runtime/packages/agenticros/src/image-binary-trim.ts +16 -0
- package/runtime/packages/agenticros/src/index.ts +85 -0
- package/runtime/packages/agenticros/src/landing-page.ts +38 -0
- package/runtime/packages/agenticros/src/memory.ts +44 -0
- package/runtime/packages/agenticros/src/plugin-api.ts +173 -0
- package/runtime/packages/agenticros/src/plugin-image-base64.ts +69 -0
- package/runtime/packages/agenticros/src/preflight.ts +110 -0
- package/runtime/packages/agenticros/src/routes.ts +328 -0
- package/runtime/packages/agenticros/src/safety/validator.ts +43 -0
- package/runtime/packages/agenticros/src/service.ts +359 -0
- package/runtime/packages/agenticros/src/skill-api.ts +65 -0
- package/runtime/packages/agenticros/src/skill-loader.ts +146 -0
- package/runtime/packages/agenticros/src/teleop/page.ts +498 -0
- package/runtime/packages/agenticros/src/teleop/routes.ts +650 -0
- package/runtime/packages/agenticros/src/tools/index.ts +26 -0
- package/runtime/packages/agenticros/src/tools/ros2-action.ts +50 -0
- package/runtime/packages/agenticros/src/tools/ros2-camera.ts +221 -0
- package/runtime/packages/agenticros/src/tools/ros2-depth-distance.ts +58 -0
- package/runtime/packages/agenticros/src/tools/ros2-introspect.ts +62 -0
- package/runtime/packages/agenticros/src/tools/ros2-memory.ts +158 -0
- package/runtime/packages/agenticros/src/tools/ros2-param.ts +87 -0
- package/runtime/packages/agenticros/src/tools/ros2-publish.ts +52 -0
- package/runtime/packages/agenticros/src/tools/ros2-service.ts +46 -0
- package/runtime/packages/agenticros/src/tools/ros2-subscribe.ts +71 -0
- package/runtime/packages/agenticros/tsconfig.json +9 -0
- package/runtime/packages/agenticros-claude-code/README.md +260 -0
- package/runtime/packages/agenticros-claude-code/config.example.json +9 -0
- package/runtime/packages/agenticros-claude-code/dist/config.d.ts +8 -0
- package/runtime/packages/agenticros-claude-code/dist/config.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/config.js +93 -0
- package/runtime/packages/agenticros-claude-code/dist/config.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/depth.d.ts +20 -0
- package/runtime/packages/agenticros-claude-code/dist/depth.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/depth.js +126 -0
- package/runtime/packages/agenticros-claude-code/dist/depth.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/coco-classes.d.ts +6 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/coco-classes.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/coco-classes.js +36 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/coco-classes.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/find-object.d.ts +33 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/find-object.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/find-object.js +134 -0
- package/runtime/packages/agenticros-claude-code/dist/find-object/find-object.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/controller.d.ts +43 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/controller.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/controller.js +73 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/controller.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/detector.d.ts +58 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/detector.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/detector.js +251 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/detector.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/loop.d.ts +61 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/loop.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/loop.js +268 -0
- package/runtime/packages/agenticros-claude-code/dist/follow-me/loop.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/index.d.ts +3 -0
- package/runtime/packages/agenticros-claude-code/dist/index.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/index.js +111 -0
- package/runtime/packages/agenticros-claude-code/dist/index.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/memory.d.ts +17 -0
- package/runtime/packages/agenticros-claude-code/dist/memory.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/memory.js +44 -0
- package/runtime/packages/agenticros-claude-code/dist/memory.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/safety.d.ts +10 -0
- package/runtime/packages/agenticros-claude-code/dist/safety.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/safety.js +34 -0
- package/runtime/packages/agenticros-claude-code/dist/safety.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/tools.d.ts +36 -0
- package/runtime/packages/agenticros-claude-code/dist/tools.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/tools.js +777 -0
- package/runtime/packages/agenticros-claude-code/dist/tools.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/transport.d.ts +17 -0
- package/runtime/packages/agenticros-claude-code/dist/transport.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/transport.js +46 -0
- package/runtime/packages/agenticros-claude-code/dist/transport.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/zero-shot/detector.d.ts +42 -0
- package/runtime/packages/agenticros-claude-code/dist/zero-shot/detector.d.ts.map +1 -0
- package/runtime/packages/agenticros-claude-code/dist/zero-shot/detector.js +114 -0
- package/runtime/packages/agenticros-claude-code/dist/zero-shot/detector.js.map +1 -0
- package/runtime/packages/agenticros-claude-code/package.json +29 -0
- package/runtime/packages/agenticros-claude-code/src/config.ts +96 -0
- package/runtime/packages/agenticros-claude-code/src/depth.ts +173 -0
- package/runtime/packages/agenticros-claude-code/src/find-object/coco-classes.ts +38 -0
- package/runtime/packages/agenticros-claude-code/src/find-object/find-object.ts +190 -0
- package/runtime/packages/agenticros-claude-code/src/follow-me/controller.ts +109 -0
- package/runtime/packages/agenticros-claude-code/src/follow-me/depth-loop.ts +420 -0
- package/runtime/packages/agenticros-claude-code/src/follow-me/detector.ts +303 -0
- package/runtime/packages/agenticros-claude-code/src/follow-me/loop.ts +330 -0
- package/runtime/packages/agenticros-claude-code/src/index.ts +125 -0
- package/runtime/packages/agenticros-claude-code/src/memory.ts +51 -0
- package/runtime/packages/agenticros-claude-code/src/safety.ts +44 -0
- package/runtime/packages/agenticros-claude-code/src/tools.ts +891 -0
- package/runtime/packages/agenticros-claude-code/src/transport.ts +58 -0
- package/runtime/packages/agenticros-claude-code/src/zero-shot/detector.ts +169 -0
- package/runtime/packages/agenticros-claude-code/tsconfig.json +9 -0
- package/runtime/packages/agenticros-claude-code/yolo-debug.mjs +106 -0
- package/runtime/packages/agenticros-gemini/README.md +139 -0
- package/runtime/packages/agenticros-gemini/package.json +28 -0
- package/runtime/packages/agenticros-gemini/scripts/smoke-api.mjs +42 -0
- package/runtime/packages/agenticros-gemini/src/chat.ts +139 -0
- package/runtime/packages/agenticros-gemini/src/config.ts +92 -0
- package/runtime/packages/agenticros-gemini/src/depth.ts +173 -0
- package/runtime/packages/agenticros-gemini/src/index.ts +58 -0
- package/runtime/packages/agenticros-gemini/src/memory.ts +32 -0
- package/runtime/packages/agenticros-gemini/src/safety.ts +44 -0
- package/runtime/packages/agenticros-gemini/src/tools.ts +516 -0
- package/runtime/packages/agenticros-gemini/src/transport.ts +58 -0
- package/runtime/packages/agenticros-gemini/tsconfig.json +8 -0
- package/runtime/packages/core/package.json +47 -0
- package/runtime/packages/core/src/banner.ts +32 -0
- package/runtime/packages/core/src/cmd-vel-twist.ts +31 -0
- package/runtime/packages/core/src/config.ts +279 -0
- package/runtime/packages/core/src/index.ts +54 -0
- package/runtime/packages/core/src/memory/__tests__/factory.test.ts +70 -0
- package/runtime/packages/core/src/memory/__tests__/local-provider.test.ts +195 -0
- package/runtime/packages/core/src/memory/__tests__/mem0-provider.test.ts +192 -0
- package/runtime/packages/core/src/memory/__tests__/smart-defaults.test.ts +46 -0
- package/runtime/packages/core/src/memory/factory.ts +63 -0
- package/runtime/packages/core/src/memory/index.ts +10 -0
- package/runtime/packages/core/src/memory/local/provider.ts +229 -0
- package/runtime/packages/core/src/memory/mem0/provider.ts +379 -0
- package/runtime/packages/core/src/memory/types.ts +96 -0
- package/runtime/packages/core/src/topic-utils.ts +95 -0
- package/runtime/packages/core/src/transport/factory.ts +47 -0
- package/runtime/packages/core/src/transport/local/conversion.ts +333 -0
- package/runtime/packages/core/src/transport/local/entities.ts +129 -0
- package/runtime/packages/core/src/transport/local/transport.ts +406 -0
- package/runtime/packages/core/src/transport/rosbridge/actions.ts +81 -0
- package/runtime/packages/core/src/transport/rosbridge/adapter.ts +157 -0
- package/runtime/packages/core/src/transport/rosbridge/client.ts +438 -0
- package/runtime/packages/core/src/transport/rosbridge/services.ts +41 -0
- package/runtime/packages/core/src/transport/rosbridge/topics.ts +60 -0
- package/runtime/packages/core/src/transport/rosbridge/types.ts +118 -0
- package/runtime/packages/core/src/transport/transport.ts +77 -0
- package/runtime/packages/core/src/transport/types.ts +137 -0
- package/runtime/packages/core/src/transport/webrtc/signaling-client.ts +196 -0
- package/runtime/packages/core/src/transport/webrtc/signaling-types.ts +130 -0
- package/runtime/packages/core/src/transport/webrtc/transport.ts +516 -0
- package/runtime/packages/core/src/transport/zenoh/adapter.ts +357 -0
- package/runtime/packages/core/src/transport/zenoh/cdr.ts +183 -0
- package/runtime/packages/core/src/transport/zenoh/keys.ts +51 -0
- package/runtime/packages/core/tsconfig.json +9 -0
- package/runtime/packages/ros-camera/package.json +30 -0
- package/runtime/packages/ros-camera/src/index.ts +13 -0
- package/runtime/packages/ros-camera/src/snapshot.ts +372 -0
- package/runtime/packages/ros-camera/tsconfig.json +9 -0
- package/runtime/pnpm-lock.yaml +5260 -0
- package/runtime/pnpm-workspace.yaml +2 -0
- package/runtime/ros2_ws/src/agenticros_agent/agenticros_agent/__init__.py +0 -0
- package/runtime/ros2_ws/src/agenticros_agent/agenticros_agent/agent_node.py +561 -0
- package/runtime/ros2_ws/src/agenticros_agent/package.xml +25 -0
- package/runtime/ros2_ws/src/agenticros_agent/resource/agenticros_agent +0 -0
- package/runtime/ros2_ws/src/agenticros_agent/setup.cfg +4 -0
- package/runtime/ros2_ws/src/agenticros_agent/setup.py +25 -0
- package/runtime/ros2_ws/src/agenticros_bringup/README.md +128 -0
- package/runtime/ros2_ws/src/agenticros_bringup/agenticros_bringup/__init__.py +1 -0
- package/runtime/ros2_ws/src/agenticros_bringup/agenticros_bringup/cmd_vel_relay.py +33 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/cmd_vel_bridge.launch.py +58 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/gazebo_turtlebot3.launch.py +69 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/mode_a_gazebo.launch.py +55 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/mode_a_gazebo_rviz.launch.py +48 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/realsense_rosbridge.launch.py +154 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/rosbridge_gazebo.launch.py +54 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/rviz.launch.py +38 -0
- package/runtime/ros2_ws/src/agenticros_bringup/launch/turtlebot3_gazebo_rviz.launch.py +42 -0
- package/runtime/ros2_ws/src/agenticros_bringup/package.xml +24 -0
- package/runtime/ros2_ws/src/agenticros_bringup/resource/agenticros_bringup +0 -0
- package/runtime/ros2_ws/src/agenticros_bringup/rviz/turtlebot3_agenticros.rviz +174 -0
- package/runtime/ros2_ws/src/agenticros_bringup/setup.cfg +4 -0
- package/runtime/ros2_ws/src/agenticros_bringup/setup.py +28 -0
- package/runtime/ros2_ws/src/agenticros_discovery/agenticros_discovery/__init__.py +0 -0
- package/runtime/ros2_ws/src/agenticros_discovery/agenticros_discovery/discovery_node.py +172 -0
- package/runtime/ros2_ws/src/agenticros_discovery/package.xml +22 -0
- package/runtime/ros2_ws/src/agenticros_discovery/resource/agenticros_discovery +0 -0
- package/runtime/ros2_ws/src/agenticros_discovery/setup.cfg +5 -0
- package/runtime/ros2_ws/src/agenticros_discovery/setup.py +25 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/README.md +66 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/agenticros_follow_me/__init__.py +1 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/agenticros_follow_me/__main__.py +5 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/agenticros_follow_me/follow_me_node.py +278 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/agenticros_follow_me/follower_controller.py +631 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/agenticros_follow_me/person_tracker.py +635 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/package.xml +22 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/resource/agenticros_follow_me +0 -0
- package/runtime/ros2_ws/src/agenticros_follow_me/setup.py +25 -0
- package/runtime/ros2_ws/src/agenticros_msgs/CMakeLists.txt +26 -0
- package/runtime/ros2_ws/src/agenticros_msgs/msg/CapabilityManifest.msg +9 -0
- package/runtime/ros2_ws/src/agenticros_msgs/package.xml +22 -0
- package/runtime/ros2_ws/src/agenticros_msgs/srv/FollowMeGetStatus.srv +11 -0
- package/runtime/ros2_ws/src/agenticros_msgs/srv/FollowMeSetDistance.srv +4 -0
- package/runtime/ros2_ws/src/agenticros_msgs/srv/FollowMeSetTarget.srv +6 -0
- package/runtime/ros2_ws/src/agenticros_msgs/srv/FollowMeStart.srv +5 -0
- package/runtime/ros2_ws/src/agenticros_msgs/srv/FollowMeStop.srv +3 -0
- package/runtime/ros2_ws/src/agenticros_msgs/srv/GetCapabilities.srv +5 -0
- package/runtime/ros2_ws/src/agenticros_sim/CMakeLists.txt +24 -0
- package/runtime/ros2_ws/src/agenticros_sim/README.md +120 -0
- package/runtime/ros2_ws/src/agenticros_sim/config/agenticros-sim.config.json +28 -0
- package/runtime/ros2_ws/src/agenticros_sim/config/amr_bridge.yaml +111 -0
- package/runtime/ros2_ws/src/agenticros_sim/config/amr_view.rviz +172 -0
- package/runtime/ros2_ws/src/agenticros_sim/env-hooks/gz_resource_path.dsv.in +3 -0
- package/runtime/ros2_ws/src/agenticros_sim/env-hooks/gz_resource_path.sh.in +7 -0
- package/runtime/ros2_ws/src/agenticros_sim/launch/sim_amr.launch.py +159 -0
- package/runtime/ros2_ws/src/agenticros_sim/models/agenticros_amr/model.config +17 -0
- package/runtime/ros2_ws/src/agenticros_sim/models/agenticros_amr/model.sdf +244 -0
- package/runtime/ros2_ws/src/agenticros_sim/package.xml +27 -0
- package/runtime/ros2_ws/src/agenticros_sim/worlds/agenticros_indoor.sdf +183 -0
- package/runtime/scripts/activate_workspace.sh +285 -0
- package/runtime/scripts/agenticros-describer.policy.yaml +96 -0
- package/runtime/scripts/agenticros-proxy.cjs +99 -0
- package/runtime/scripts/agenticros-rosbridge.policy.yaml +62 -0
- package/runtime/scripts/check-cli-tarball-size.mjs +42 -0
- package/runtime/scripts/configure_agenticros.sh +200 -0
- package/runtime/scripts/configure_for_sim.sh +64 -0
- package/runtime/scripts/fix-openclaw-control-ui-path.sh +20 -0
- package/runtime/scripts/install_cli.sh +94 -0
- package/runtime/scripts/install_rosbridge_from_source.sh +67 -0
- package/runtime/scripts/lib/agenticros-banner.sh +28 -0
- package/runtime/scripts/onboard_robot.sh +75 -0
- package/runtime/scripts/openai.policy.yaml +77 -0
- package/runtime/scripts/openclaw-dashboard-url.cjs +49 -0
- package/runtime/scripts/pack-runtime.mjs +245 -0
- package/runtime/scripts/run_demo_native.sh +43 -0
- package/runtime/scripts/run_nemoclaw_host_stack.sh +91 -0
- package/runtime/scripts/run_robot_rosbridge.sh +36 -0
- package/runtime/scripts/sandbox_rosbridge_relay.py +137 -0
- package/runtime/scripts/setup-openclaw-local.cjs +75 -0
- package/runtime/scripts/setup_gateway_plugin.sh +329 -0
- package/runtime/scripts/setup_robot.sh +113 -0
- package/runtime/scripts/setup_workspace.sh +484 -0
- package/runtime/scripts/sim/run_sim.sh +146 -0
- package/runtime/scripts/smoke_test_nemoclaw.sh +123 -0
- package/runtime/scripts/start_demo.sh +55 -0
- package/runtime/scripts/sync-skill-tools.mjs +335 -0
- package/runtime/scripts/test-follow-me-sim.mjs +135 -0
- package/runtime/scripts/test-mcp-e2e.mjs +184 -0
- package/runtime/scripts/test-rclnodejs.mts +129 -0
- package/runtime/scripts/use-openclaw-2026.2.26.sh +19 -0
- package/runtime/scripts/use-openclaw-2026.3.11.sh +19 -0
- package/runtime/scripts/zenoh-bridge-ros2dds-robot.json5 +30 -0
- package/runtime/scripts/zenohd-agenticros.json5 +11 -0
- package/runtime/scripts/zenohd-rosclaw.json5 +11 -0
- package/runtime/tsconfig.base.json +19 -0
- package/index.js +0 -6
|
@@ -0,0 +1 @@
|
|
|
1
|
+
{"version":3,"file":"state.js","sourceRoot":"","sources":["../../src/util/state.ts"],"names":[],"mappings":"AAAA;;;;;;GAMG;AAEH,OAAO,EAAE,UAAU,EAAE,SAAS,EAAE,YAAY,EAAE,aAAa,EAAE,MAAM,SAAS,CAAC;AAC7E,OAAO,EAAE,OAAO,EAAE,IAAI,EAAE,MAAM,WAAW,CAAC;AAC1C,OAAO,EAAE,WAAW,EAAE,MAAM,YAAY,CAAC;AAiBzC,SAAS,SAAS;IAChB,OAAO,IAAI,CAAC,WAAW,EAAE,CAAC,WAAW,EAAE,gBAAgB,CAAC,CAAC;AAC3D,CAAC;AAED,MAAM,UAAU,SAAS;IACvB,MAAM,CAAC,GAAG,SAAS,EAAE,CAAC;IACtB,IAAI,CAAC,UAAU,CAAC,CAAC,CAAC;QAAE,OAAO,EAAE,CAAC;IAC9B,IAAI,CAAC;QACH,MAAM,GAAG,GAAG,YAAY,CAAC,CAAC,EAAE,MAAM,CAAC,CAAC;QACpC,MAAM,GAAG,GAAG,IAAI,CAAC,KAAK,CAAC,GAAG,CAAa,CAAC;QACxC,IAAI,OAAO,GAAG,KAAK,QAAQ,IAAI,GAAG,KAAK,IAAI;YAAE,OAAO,GAAG,CAAC;QACxD,OAAO,EAAE,CAAC;IACZ,CAAC;IAAC,MAAM,CAAC;QACP,OAAO,EAAE,CAAC;IACZ,CAAC;AACH,CAAC;AAED,MAAM,UAAU,UAAU,CAAC,KAAwB;IACjD,MAAM,CAAC,GAAG,SAAS,EAAE,CAAC;IACtB,SAAS,CAAC,OAAO,CAAC,CAAC,CAAC,EAAE,EAAE,SAAS,EAAE,IAAI,EAAE,CAAC,CAAC;IAC3C,MAAM,OAAO,GAAG,SAAS,EAAE,CAAC;IAC5B,MAAM,IAAI,GAAa,EAAE,CAAC,EAAE,CAAC,EAAE,GAAG,OAAO,EAAE,GAAG,KAAK,EAAE,CAAC;IACtD,aAAa,CAAC,CAAC,EAAE,IAAI,CAAC,SAAS,CAAC,IAAI,EAAE,IAAI,EAAE,CAAC,CAAC,CAAC,CAAC;IAChD,OAAO,IAAI,CAAC;AACd,CAAC;AAED,8EAA8E;AAC9E,MAAM,UAAU,SAAS,CAAC,GAAuB;IAC/C,IAAI,CAAC,GAAG;QAAE,OAAO,SAAS,CAAC;IAC3B,MAAM,IAAI,GAAG,IAAI,IAAI,CAAC,GAAG,CAAC,CAAC,OAAO,EAAE,CAAC;IACrC,IAAI,CAAC,MAAM,CAAC,QAAQ,CAAC,IAAI,CAAC;QAAE,OAAO,SAAS,CAAC;IAC7C,MAAM,IAAI,GAAG,IAAI,CAAC,KAAK,CAAC,CAAC,IAAI,CAAC,GAAG,EAAE,GAAG,IAAI,CAAC,GAAG,UAAU,CAAC,CAAC;IAC1D,IAAI,IAAI,IAAI,CAAC;QAAE,OAAO,OAAO,CAAC;IAC9B,IAAI,IAAI,KAAK,CAAC;QAAE,OAAO,WAAW,CAAC;IACnC,IAAI,IAAI,GAAG,EAAE;QAAE,OAAO,GAAG,IAAI,WAAW,CAAC;IACzC,IAAI,IAAI,GAAG,GAAG;QAAE,OAAO,GAAG,IAAI,CAAC,KAAK,CAAC,IAAI,GAAG,EAAE,CAAC,aAAa,CAAC;IAC7D,OAAO,GAAG,IAAI,CAAC,KAAK,CAAC,IAAI,GAAG,GAAG,CAAC,YAAY,CAAC;AAC/C,CAAC"}
|
package/package.json
CHANGED
|
@@ -1 +1,60 @@
|
|
|
1
|
-
{
|
|
1
|
+
{
|
|
2
|
+
"name": "agenticros",
|
|
3
|
+
"version": "0.1.1",
|
|
4
|
+
"type": "module",
|
|
5
|
+
"description": "AgenticROS - agentic AI for ROS-powered robots. Single CLI to launch real-robot or simulated demos, manage configuration, and inspect status.",
|
|
6
|
+
"keywords": [
|
|
7
|
+
"ros",
|
|
8
|
+
"ros2",
|
|
9
|
+
"robotics",
|
|
10
|
+
"ai",
|
|
11
|
+
"agent",
|
|
12
|
+
"claude",
|
|
13
|
+
"openclaw",
|
|
14
|
+
"gazebo",
|
|
15
|
+
"simulation",
|
|
16
|
+
"cli"
|
|
17
|
+
],
|
|
18
|
+
"main": "./dist/index.js",
|
|
19
|
+
"bin": {
|
|
20
|
+
"agenticros": "./dist/index.js"
|
|
21
|
+
},
|
|
22
|
+
"files": [
|
|
23
|
+
"dist",
|
|
24
|
+
"runtime",
|
|
25
|
+
"README.md",
|
|
26
|
+
"LICENSE"
|
|
27
|
+
],
|
|
28
|
+
"publishConfig": {
|
|
29
|
+
"access": "public"
|
|
30
|
+
},
|
|
31
|
+
"engines": {
|
|
32
|
+
"node": ">=20.0.0"
|
|
33
|
+
},
|
|
34
|
+
"dependencies": {
|
|
35
|
+
"@inquirer/prompts": "^7.0.0",
|
|
36
|
+
"commander": "^12.1.0",
|
|
37
|
+
"execa": "^9.5.0",
|
|
38
|
+
"ora": "^8.1.1",
|
|
39
|
+
"picocolors": "^1.1.1"
|
|
40
|
+
},
|
|
41
|
+
"devDependencies": {
|
|
42
|
+
"@types/node": "^20.17.0",
|
|
43
|
+
"typescript": "^5.7.0"
|
|
44
|
+
},
|
|
45
|
+
"author": "PlaiPin",
|
|
46
|
+
"license": "Apache-2.0",
|
|
47
|
+
"homepage": "https://github.com/PlaiPin/agenticros",
|
|
48
|
+
"repository": {
|
|
49
|
+
"type": "git",
|
|
50
|
+
"url": "git+https://github.com/PlaiPin/agenticros.git",
|
|
51
|
+
"directory": "packages/agenticros-cli"
|
|
52
|
+
},
|
|
53
|
+
"scripts": {
|
|
54
|
+
"build": "tsc",
|
|
55
|
+
"typecheck": "tsc --noEmit",
|
|
56
|
+
"clean": "rm -rf dist runtime tsconfig.tsbuildinfo",
|
|
57
|
+
"pack:runtime": "node ../../scripts/pack-runtime.mjs",
|
|
58
|
+
"size:check": "node ../../scripts/check-cli-tarball-size.mjs"
|
|
59
|
+
}
|
|
60
|
+
}
|
|
@@ -0,0 +1,11 @@
|
|
|
1
|
+
{
|
|
2
|
+
"packedAt": "2026-06-05T21:21:33.732Z",
|
|
3
|
+
"repo": "https://github.com/PlaiPin/agenticros",
|
|
4
|
+
"note": "This directory is a snapshot of the agenticros monorepo source. `agenticros init` will copy it to ~/agenticros and run pnpm install + colcon build there.",
|
|
5
|
+
"layout": {
|
|
6
|
+
"scripts": "scripts/",
|
|
7
|
+
"ros2_packages": "ros2_ws/src/agenticros_*",
|
|
8
|
+
"js_packages": "packages/*",
|
|
9
|
+
"mcp_prebuilt": "packages/agenticros-claude-code/dist/index.js"
|
|
10
|
+
}
|
|
11
|
+
}
|
package/runtime/LICENSE
ADDED
|
@@ -0,0 +1,192 @@
|
|
|
1
|
+
Apache License
|
|
2
|
+
Version 2.0, January 2004
|
|
3
|
+
http://www.apache.org/licenses/
|
|
4
|
+
|
|
5
|
+
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
|
|
6
|
+
|
|
7
|
+
1. Definitions.
|
|
8
|
+
|
|
9
|
+
"License" shall mean the terms and conditions for use, reproduction,
|
|
10
|
+
and distribution as defined by Sections 1 through 9 of this document.
|
|
11
|
+
|
|
12
|
+
"Licensor" shall mean the copyright owner or entity authorized by
|
|
13
|
+
the copyright owner that is granting the License.
|
|
14
|
+
|
|
15
|
+
"Legal Entity" shall mean the union of the acting entity and all
|
|
16
|
+
other entities that control, are controlled by, or are under common
|
|
17
|
+
control with that entity. For the purposes of this definition,
|
|
18
|
+
"control" means (i) the power, direct or indirect, to cause the
|
|
19
|
+
direction or management of such entity, whether by contract or
|
|
20
|
+
otherwise, or (ii) ownership of fifty percent (50%) or more of the
|
|
21
|
+
outstanding shares, or (iii) beneficial ownership of such entity.
|
|
22
|
+
|
|
23
|
+
"You" (or "Your") shall mean an individual or Legal Entity
|
|
24
|
+
exercising permissions granted by this License.
|
|
25
|
+
|
|
26
|
+
"Source" form shall mean the preferred form for making modifications,
|
|
27
|
+
including but not limited to software source code, documentation
|
|
28
|
+
source, and configuration files.
|
|
29
|
+
|
|
30
|
+
"Object" form shall mean any form resulting from mechanical
|
|
31
|
+
transformation or translation of a Source form, including but
|
|
32
|
+
not limited to compiled object code, generated documentation,
|
|
33
|
+
and conversions to other media types.
|
|
34
|
+
|
|
35
|
+
"Work" shall mean the work of authorship, whether in Source or
|
|
36
|
+
Object form, made available under the License, as indicated by a
|
|
37
|
+
copyright notice that is included in or attached to the work
|
|
38
|
+
(an example is provided in the Appendix below).
|
|
39
|
+
|
|
40
|
+
"Derivative Works" shall mean any work, whether in Source or Object
|
|
41
|
+
form, that is based on (or derived from) the Work and for which the
|
|
42
|
+
editorial revisions, annotations, elaborations, or other modifications
|
|
43
|
+
represent, as a whole, an original work of authorship. For the purposes
|
|
44
|
+
of this License, Derivative Works shall not include works that remain
|
|
45
|
+
separable from, or merely link (or bind by name) to the interfaces of,
|
|
46
|
+
the Work and Derivative Works thereof.
|
|
47
|
+
|
|
48
|
+
"Contribution" shall mean any work of authorship, including
|
|
49
|
+
the original version of the Work and any modifications or additions
|
|
50
|
+
to that Work or Derivative Works thereof, that is intentionally
|
|
51
|
+
submitted to Licensor for inclusion in the Work by the copyright owner
|
|
52
|
+
or by an individual or Legal Entity authorized to submit on behalf of
|
|
53
|
+
the copyright owner. For the purposes of this definition, "submitted"
|
|
54
|
+
means any form of electronic, verbal, or written communication sent
|
|
55
|
+
to the Licensor or its representatives, including but not limited to
|
|
56
|
+
communication on electronic mailing lists, source code control systems,
|
|
57
|
+
and issue tracking systems that are managed by, or on behalf of, the
|
|
58
|
+
Licensor for the purpose of discussing and improving the Work, but
|
|
59
|
+
excluding communication that is conspicuously marked or otherwise
|
|
60
|
+
designated in writing by the copyright owner as "Not a Contribution."
|
|
61
|
+
|
|
62
|
+
"Contributor" shall mean Licensor and any individual or Legal Entity
|
|
63
|
+
on behalf of whom a Contribution has been received by Licensor and
|
|
64
|
+
subsequently incorporated within the Work.
|
|
65
|
+
|
|
66
|
+
2. Grant of Copyright License. Subject to the terms and conditions of
|
|
67
|
+
this License, each Contributor hereby grants to You a perpetual,
|
|
68
|
+
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
|
69
|
+
copyright license to reproduce, prepare Derivative Works of,
|
|
70
|
+
publicly display, publicly perform, sublicense, and distribute the
|
|
71
|
+
Work and such Derivative Works in Source or Object form.
|
|
72
|
+
|
|
73
|
+
3. Grant of Patent License. Subject to the terms and conditions of
|
|
74
|
+
this License, each Contributor hereby grants to You a perpetual,
|
|
75
|
+
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
|
76
|
+
(except as stated in this section) patent license to make, have made,
|
|
77
|
+
use, offer to sell, sell, import, and otherwise transfer the Work,
|
|
78
|
+
where such license applies only to those patent claims licensable
|
|
79
|
+
by such Contributor that are necessarily infringed by their
|
|
80
|
+
Contribution(s) alone or by combination of their Contribution(s)
|
|
81
|
+
with the Work to which such Contribution(s) was submitted. If You
|
|
82
|
+
institute patent litigation against any entity (including a
|
|
83
|
+
cross-claim or counterclaim in a lawsuit) alleging that the Work
|
|
84
|
+
or a Contribution incorporated within the Work constitutes direct
|
|
85
|
+
or contributory patent infringement, then any patent licenses
|
|
86
|
+
granted to You under this License for that Work shall terminate
|
|
87
|
+
as of the date such litigation is filed.
|
|
88
|
+
|
|
89
|
+
4. Redistribution. You may reproduce and distribute copies of the
|
|
90
|
+
Work or Derivative Works thereof in any medium, with or without
|
|
91
|
+
modifications, and in Source or Object form, provided that You
|
|
92
|
+
meet the following conditions:
|
|
93
|
+
|
|
94
|
+
(a) You must give any other recipients of the Work or
|
|
95
|
+
Derivative Works a copy of this License; and
|
|
96
|
+
|
|
97
|
+
(b) You must cause any modified files to carry prominent notices
|
|
98
|
+
stating that You changed the files; and
|
|
99
|
+
|
|
100
|
+
(c) You must retain, in the Source form of any Derivative Works
|
|
101
|
+
that You distribute, all copyright, patent, trademark, and
|
|
102
|
+
attribution notices from the Source form of the Work,
|
|
103
|
+
excluding those notices that do not pertain to any part of
|
|
104
|
+
the Derivative Works; and
|
|
105
|
+
|
|
106
|
+
(d) If the Work includes a "NOTICE" text file as part of its
|
|
107
|
+
distribution, then any Derivative Works that You distribute must
|
|
108
|
+
include a readable copy of the attribution notices contained
|
|
109
|
+
within such NOTICE file, excluding those notices that do not
|
|
110
|
+
pertain to any part of the Derivative Works, in at least one
|
|
111
|
+
of the following places: within a NOTICE text file distributed
|
|
112
|
+
as part of the Derivative Works; within the Source form or
|
|
113
|
+
documentation, if provided along with the Derivative Works; or,
|
|
114
|
+
within a display generated by the Derivative Works, if and
|
|
115
|
+
wherever such third-party notices normally appear. The contents
|
|
116
|
+
of the NOTICE file are for informational purposes only and
|
|
117
|
+
do not modify the License. You may add Your own attribution
|
|
118
|
+
notices within Derivative Works that You distribute, alongside
|
|
119
|
+
or as an addendum to the NOTICE text from the Work, provided
|
|
120
|
+
that such additional attribution notices cannot be construed
|
|
121
|
+
as modifying the License.
|
|
122
|
+
|
|
123
|
+
You may add Your own copyright statement to Your modifications and
|
|
124
|
+
may provide additional or different license terms and conditions
|
|
125
|
+
for use, reproduction, or distribution of Your modifications, or
|
|
126
|
+
for any such Derivative Works as a whole, provided Your use,
|
|
127
|
+
reproduction, and distribution of the Work otherwise complies with
|
|
128
|
+
the conditions stated in this License.
|
|
129
|
+
|
|
130
|
+
5. Submission of Contributions. Unless You explicitly state otherwise,
|
|
131
|
+
any Contribution intentionally submitted for inclusion in the Work
|
|
132
|
+
by You to the Licensor shall be under the terms and conditions of
|
|
133
|
+
this License, without any additional terms or conditions.
|
|
134
|
+
Notwithstanding the above, nothing herein shall supersede or modify
|
|
135
|
+
the terms of any separate license agreement you may have executed
|
|
136
|
+
with Licensor regarding such Contributions.
|
|
137
|
+
|
|
138
|
+
6. Trademarks. This License does not grant permission to use the trade
|
|
139
|
+
names, trademarks, service marks, or product names of the Licensor,
|
|
140
|
+
except as required for describing the origin of the Work and
|
|
141
|
+
reproducing the content of the NOTICE file.
|
|
142
|
+
|
|
143
|
+
7. Disclaimer of Warranty. Unless required by applicable law or
|
|
144
|
+
agreed to in writing, Licensor provides the Work (and each
|
|
145
|
+
Contributor provides its Contributions) on an "AS IS" BASIS,
|
|
146
|
+
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
|
147
|
+
implied, including, without limitation, any warranties or conditions
|
|
148
|
+
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
|
149
|
+
PARTICULAR PURPOSE. You are solely responsible for determining the
|
|
150
|
+
appropriateness of using or redistributing the Work and assume any
|
|
151
|
+
risks associated with Your exercise of permissions under this License.
|
|
152
|
+
|
|
153
|
+
8. Limitation of Liability. In no event and under no legal theory,
|
|
154
|
+
whether in tort (including negligence), contract, or otherwise,
|
|
155
|
+
unless required by applicable law (such as deliberate and grossly
|
|
156
|
+
negligent acts) or agreed to in writing, shall any Contributor be
|
|
157
|
+
liable to You for damages, including any direct, indirect, special,
|
|
158
|
+
incidental, or consequential damages of any character arising as a
|
|
159
|
+
result of this License or out of the use or inability to use the
|
|
160
|
+
Work (including but not limited to damages for loss of goodwill,
|
|
161
|
+
work stoppage, computer failure or malfunction, or any and all
|
|
162
|
+
other commercial damages or losses), even if such Contributor
|
|
163
|
+
has been advised of the possibility of such damages.
|
|
164
|
+
|
|
165
|
+
9. Accepting Warranty or Support. While redistributing the Work or
|
|
166
|
+
Derivative Works thereof, You may choose to offer, and charge a
|
|
167
|
+
fee for, acceptance of support, warranty, indemnity, or other
|
|
168
|
+
liability obligations and/or rights consistent with this License.
|
|
169
|
+
However, in accepting such obligations, You may act only on Your
|
|
170
|
+
own behalf and on Your sole responsibility, not on behalf of any
|
|
171
|
+
other Contributor, and only if You agree to indemnify, defend,
|
|
172
|
+
and hold each Contributor harmless for any liability incurred by,
|
|
173
|
+
or claims asserted against, such Contributor by reason of your
|
|
174
|
+
accepting any such warranty or support.
|
|
175
|
+
|
|
176
|
+
END OF TERMS AND CONDITIONS
|
|
177
|
+
|
|
178
|
+
Copyright 2025 PlaiPin
|
|
179
|
+
|
|
180
|
+
Licensed under the Apache License, Version 2.0 (the "License");
|
|
181
|
+
you may not use this file except in compliance with the License.
|
|
182
|
+
You may obtain a copy of the License at
|
|
183
|
+
|
|
184
|
+
http://www.apache.org/licenses/LICENSE-2.0
|
|
185
|
+
|
|
186
|
+
Unless required by applicable law or agreed to in writing, software
|
|
187
|
+
distributed under the License is distributed on an "AS IS" BASIS,
|
|
188
|
+
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
|
189
|
+
implied, including, without limitation, any warranties or conditions
|
|
190
|
+
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
|
191
|
+
PARTICULAR PURPOSE. See the License for the specific language governing
|
|
192
|
+
permissions and limitations under the License.
|
|
@@ -0,0 +1,273 @@
|
|
|
1
|
+
# AgenticROS
|
|
2
|
+
|
|
3
|
+
```text
|
|
4
|
+
_ _ _ ____ ___ ____
|
|
5
|
+
/ \ __ _ ___ _ __ | |_(_) ___ | _ \ / _ \/ ___|
|
|
6
|
+
/ _ \ / _` |/ _ \ '_ \| __| |/ __|| |_) | | | \___ \
|
|
7
|
+
/ ___ \ (_| | __/ | | | |_| | (__ | _ <| |_| |___) |
|
|
8
|
+
/_/ \_\__, |\___|_| |_|\__|_|\___||_| \_\___/|____/
|
|
9
|
+
|___/
|
|
10
|
+
AgenticROS - agentic AI for ROS-powered robots
|
|
11
|
+
```
|
|
12
|
+
|
|
13
|
+
**Physical AI Agents for ROS Robots**
|
|
14
|
+
|
|
15
|
+
[](https://www.youtube.com/watch?v=_fbWhYcPj0M)
|
|
16
|
+
|
|
17
|
+
> ▶ [Watch the AgenticROS intro on YouTube](https://www.youtube.com/watch?v=_fbWhYcPj0M)
|
|
18
|
+
|
|
19
|
+
AgenticROS turns ROS 2 robots into agent-native machines. Speak, type, or message — and your robot perceives, reasons, and acts. It is an open, AI-agent-agnostic interface layer that bridges the world of frontier reasoning models with the world of cameras, depth sensors, motors, and `cmd_vel`, so robots stop being remote-controlled tools and start collaborating like teammates.
|
|
20
|
+
|
|
21
|
+
With AgenticROS, your robot can describe what it sees, follow intent ("go check the front door"), run skills you author, and respond to natural language across the agent platforms you already use. **One ROS 2 workspace, one config, many agents.**
|
|
22
|
+
|
|
23
|
+
## Supported AI Agent platforms
|
|
24
|
+
|
|
25
|
+
- **[OpenClaw](https://openclaw.ai)** — Native gateway plugin with ROS 2 tools, commands, a config UI, a teleop web app, and a skill loader. The flagship integration.
|
|
26
|
+
- **[NVIDIA NemoClaw](https://github.com/NVIDIA/NemoClaw)** — Run AgenticROS inside NemoClaw's OpenShell sandbox with policy-enforced egress and managed NVIDIA inference; ROS 2, RealSense, and rosbridge stay on the host while the plugin runs sandboxed.
|
|
27
|
+
- **[Anthropic Claude](https://www.anthropic.com/claude)** — A single MCP server powers **Claude Code** (terminal), **Claude Desktop** (macOS / Windows), and **Claude Dispatch** (iOS, paired to your Mac). Ask Claude what your robot sees, and it answers with a live camera snapshot and depth reading.
|
|
28
|
+
- **[Google Gemini](https://ai.google.dev/)** — Standalone CLI that uses Gemini function calling against the same ROS 2 tools (no MCP required) — ideal for scripting and headless agents.
|
|
29
|
+
|
|
30
|
+
AgenticROS is built so that new adapters (LangGraph, OpenAI, local models, voice stacks, etc.) can be added without touching the ROS 2 layer. The core transport and tool contract are platform-agnostic; adapters are thin shims that surface those tools to each agent runtime.
|
|
31
|
+
|
|
32
|
+
## Architecture
|
|
33
|
+
|
|
34
|
+

|
|
35
|
+
|
|
36
|
+
- **Core** (`packages/core`): Platform-agnostic ROS2 transport (rosbridge, Zenoh, local, WebRTC), config schema, and shared types. No dependency on any specific AI platform.
|
|
37
|
+
- **Adapters** (`packages/agenticros`, and later others): Implement the contract for each AI platform. The OpenClaw adapter registers tools, commands, and HTTP routes with the OpenClaw gateway and uses the core for all ROS2 communication.
|
|
38
|
+
- `**packages/agenticros-claude-code`** — MCP server for **Claude Code** (terminal), **Claude desktop** (macOS), and **Dispatch** (iOS paired to Mac). See [packages/agenticros-claude-code/README.md](packages/agenticros-claude-code/README.md).
|
|
39
|
+
- `**packages/agenticros-gemini`** — **Gemini CLI**: use Google Gemini to chat with your robot from the terminal (same ROS2 tools, no MCP). See [packages/agenticros-gemini/README.md](packages/agenticros-gemini/README.md).
|
|
40
|
+
|
|
41
|
+
```
|
|
42
|
+
User (messaging app) → OpenClaw Gateway → AgenticROS OpenClaw plugin → Core → ROS2 robots
|
|
43
|
+
Claude (Code / desktop / Dispatch) → agenticros MCP server → Core → ROS2 robots (Zenoh/rosbridge)
|
|
44
|
+
Gemini CLI → @agenticros/gemini (function calling) → Core → ROS2 robots
|
|
45
|
+
```
|
|
46
|
+
|
|
47
|
+
## Repository layout
|
|
48
|
+
|
|
49
|
+
- `**packages/core**` — Transport, types, config (Zod). Used by all adapters.
|
|
50
|
+
- `**packages/agenticros**` — OpenClaw plugin: tools, commands, config page, teleop routes.
|
|
51
|
+
- `**packages/agenticros-claude-code**` — MCP server for Claude Code + Claude desktop / Dispatch (tools only; no config UI).
|
|
52
|
+
- `**packages/agenticros-gemini**` — Gemini CLI (function calling; no MCP).
|
|
53
|
+
- `**ros2_ws/**` — ROS2 workspace: `agenticros_msgs`, `agenticros_bringup` (Gazebo + RViz + rosbridge launches), `agenticros_discovery`, `agenticros_agent`, `agenticros_follow_me`.
|
|
54
|
+
- `**docs/**` — Architecture, skills, robot setup, Zenoh, teleop.
|
|
55
|
+
- `**scripts/**` — Workspace setup, gateway plugin config, run demos.
|
|
56
|
+
- `**docker/**` — Docker Compose and Dockerfiles for ROS2 + plugin images.
|
|
57
|
+
- `**examples/**` — Example projects.
|
|
58
|
+
|
|
59
|
+
## Requirements
|
|
60
|
+
|
|
61
|
+
- Node.js >= 20, pnpm >= 9
|
|
62
|
+
- ROS2 (Jazzy or compatible) for building and running the ROS2 packages
|
|
63
|
+
- OpenClaw gateway for the OpenClaw plugin
|
|
64
|
+
|
|
65
|
+
## Quick start
|
|
66
|
+
|
|
67
|
+
1. **Install dependencies**
|
|
68
|
+
```bash
|
|
69
|
+
pnpm install
|
|
70
|
+
```
|
|
71
|
+
2. **Build ROS2 workspace** (optional, if you need discovery/agent/follow_me nodes)
|
|
72
|
+
```bash
|
|
73
|
+
cd ros2_ws
|
|
74
|
+
colcon build --packages-select agenticros_msgs agenticros_bringup agenticros_discovery agenticros_agent agenticros_follow_me
|
|
75
|
+
source install/setup.bash
|
|
76
|
+
```
|
|
77
|
+
3. **Type-check packages**
|
|
78
|
+
```bash
|
|
79
|
+
pnpm typecheck
|
|
80
|
+
```
|
|
81
|
+
4. **Install and test the OpenClaw plugin**
|
|
82
|
+
Point the OpenClaw gateway at this repo’s `packages/agenticros` (or at a built package). Configure the plugin under `plugins.entries.agenticros.config` in your OpenClaw config file. Run `./scripts/setup_gateway_plugin.sh` from the repo root to register the plugin and print next steps. **Recommended:** OpenClaw **2026.3.11** or later — plugin routes work at [http://127.0.0.1:18789/plugins/agenticros/](http://127.0.0.1:18789/plugins/agenticros/) (config, teleop). For local dev without token auth, run `**node scripts/setup-openclaw-local.cjs`** then restart the gateway. **If URLs don't load** (e.g. gateway logs "missing or invalid auth" on older versions): run `**./scripts/use-openclaw-2026.2.26.sh`** as fallback. See **docs/openclaw-releases-and-plugin-routes.md**.
|
|
83
|
+
|
|
84
|
+
**With token auth:** Run `node scripts/agenticros-proxy.cjs 18790` and open [http://127.0.0.1:18790/plugins/agenticros/](http://127.0.0.1:18790/plugins/agenticros/). See **docs/teleop.md**.
|
|
85
|
+
|
|
86
|
+
See `**docs/`** for robot setup, skills, teleop, and Docker.
|
|
87
|
+
|
|
88
|
+
## RViz2 and Gazebo (TurtleBot3 + rosbridge)
|
|
89
|
+
|
|
90
|
+
The package `**agenticros_bringup`** provides launch files and an RViz2 config so you can run the same style of stack used in `**examples/turtlebot-chat**` and `**docker/**`: TurtleBot3 in Gazebo, `**/scan**`, `**/cmd_vel**`, and rosbridge on **port 9090** for the AgenticROS plugin.
|
|
91
|
+
|
|
92
|
+
**Install** (Ubuntu / ROS 2 Jazzy): `sudo apt install ros-jazzy-turtlebot3-gazebo ros-jazzy-rviz2 ros-jazzy-rosbridge-suite` (or rely on the Docker image, which already includes them). `**colcon build` does not install this** — if you see `package 'turtlebot3_gazebo' not found`, run the `apt` line above, then verify with `ros2 pkg prefix turtlebot3_gazebo` after sourcing `/opt/ros/jazzy/setup.bash`.
|
|
93
|
+
|
|
94
|
+
For **namespaced** `cmd_vel` (same `robot.namespace` as the plugin in OpenClaw), pass `**robot_namespace:=<id>`** to the Gazebo bringup launches, or see [agenticros_bringup README](ros2_ws/src/agenticros_bringup/README.md#namespaced-cmd_vel-agenticros-robotnamespace).
|
|
95
|
+
|
|
96
|
+
**Build** the workspace package (from `**ros2_ws`** after a full `colcon build`, or alone):
|
|
97
|
+
|
|
98
|
+
```bash
|
|
99
|
+
cd ros2_ws
|
|
100
|
+
source /opt/ros/jazzy/setup.bash
|
|
101
|
+
colcon build --packages-select agenticros_bringup
|
|
102
|
+
source install/setup.bash
|
|
103
|
+
```
|
|
104
|
+
|
|
105
|
+
**Commands** (after `source install/setup.bash`):
|
|
106
|
+
|
|
107
|
+
|
|
108
|
+
| Goal | Command |
|
|
109
|
+
| ----------------------------------------------------------------------------- | ------------------------------------------------------------------ |
|
|
110
|
+
| **Rosbridge + Gazebo** (headless-friendly; plugin uses `ws://localhost:9090`) | `ros2 launch agenticros_bringup rosbridge_gazebo.launch.py` |
|
|
111
|
+
| **Gazebo + RViz** on one machine (needs a display) | `ros2 launch agenticros_bringup turtlebot3_gazebo_rviz.launch.py` |
|
|
112
|
+
| **RViz only** (simulation already running) | `ros2 launch agenticros_bringup rviz.launch.py use_sim_time:=true` |
|
|
113
|
+
| **Gazebo only** (you start rosbridge yourself) | `ros2 launch agenticros_bringup gazebo_turtlebot3.launch.py` |
|
|
114
|
+
|
|
115
|
+
|
|
116
|
+
**Parameters**: e.g. `turtlebot3_model:=waffle`, or `rviz_config:=/path/to/custom.rviz` for the RViz launch.
|
|
117
|
+
|
|
118
|
+
**Mode A (local DDS)** — OpenClaw and Gazebo on the **same machine**, plugin transport `**local`** (no rosbridge). Match `**ROS_DOMAIN_ID`** between the sim and the plugin (default `**0**`):
|
|
119
|
+
|
|
120
|
+
```bash
|
|
121
|
+
ros2 launch agenticros_bringup mode_a_gazebo.launch.py
|
|
122
|
+
# With RViz: ros2 launch agenticros_bringup mode_a_gazebo_rviz.launch.py
|
|
123
|
+
```
|
|
124
|
+
|
|
125
|
+
In the AgenticROS config UI, set **Transport mode** to **local** and **Domain ID** to the same value as `ros_domain_id` (default `0`). Then drive the robot with the usual tools (e.g. `ros2_publish` on `/cmd_vel`).
|
|
126
|
+
|
|
127
|
+
**Docker** (starts Gazebo + TurtleBot3 + rosbridge — typical for **Mode B** plugin on host → `ws://localhost:9090`):
|
|
128
|
+
|
|
129
|
+
```bash
|
|
130
|
+
cd docker
|
|
131
|
+
docker compose -f docker-compose.yml -f docker-compose.sim.yml up ros2
|
|
132
|
+
```
|
|
133
|
+
|
|
134
|
+
Then configure the AgenticROS plugin with `**ws://localhost:9090**` as usual. The bundled RViz config is `**turtlebot3_agenticros.rviz**` (fixed frame `**odom**`, LaserScan `**/scan**`, RobotModel from `**/robot_description**`). Adjust displays in RViz if your robot uses different topic names.
|
|
135
|
+
|
|
136
|
+
Details: [ros2_ws/src/agenticros_bringup/README.md](ros2_ws/src/agenticros_bringup/README.md).
|
|
137
|
+
|
|
138
|
+
## Running AgenticROS on NemoClaw
|
|
139
|
+
|
|
140
|
+
[NVIDIA NemoClaw](https://github.com/NVIDIA/NemoClaw) packages OpenClaw inside an OpenShell sandbox container with policy-enforced egress and managed inference. AgenticROS plugs into that OpenClaw the same way it plugs into a "vanilla" gateway — with one twist: ROS 2, RealSense, and rosbridge run on the **host**, and only the AgenticROS plugin runs **inside** the sandbox. The plugin reaches the host over the Docker bridge at `host.docker.internal:9090`.
|
|
141
|
+
|
|
142
|
+
Quick steps (sandbox named `nemo`, robot has namespace `<NS>`):
|
|
143
|
+
|
|
144
|
+
```bash
|
|
145
|
+
# 1. Build + pack the plugin so it works in the sandbox's offline-npm env
|
|
146
|
+
pnpm install && pnpm build
|
|
147
|
+
pnpm --filter @agenticros/agenticros deploy --prod /tmp/agenticros-deploy
|
|
148
|
+
rm -f /tmp/agenticros-deploy/node_modules/.pnpm/node_modules/@agenticros/agenticros
|
|
149
|
+
|
|
150
|
+
# 2. Copy it into the sandbox and chown to the sandbox user
|
|
151
|
+
CONTAINER=$(docker ps --format '{{.Names}}' | grep '^openshell-nemo-')
|
|
152
|
+
docker exec "$CONTAINER" rm -rf /sandbox/agenticros && docker exec "$CONTAINER" mkdir -p /sandbox/agenticros
|
|
153
|
+
docker cp /tmp/agenticros-deploy/. "$CONTAINER:/sandbox/agenticros/"
|
|
154
|
+
docker exec "$CONTAINER" chown -R sandbox:sandbox /sandbox/agenticros
|
|
155
|
+
|
|
156
|
+
# 3. Register + configure the plugin inside the sandbox (HOME=/sandbox is required)
|
|
157
|
+
docker exec -u sandbox -e HOME=/sandbox "$CONTAINER" \
|
|
158
|
+
openclaw plugins install -l /sandbox/agenticros # Ctrl-C once it starts logging "ROS2 transport status:"
|
|
159
|
+
|
|
160
|
+
# 4. Open the host's rosbridge port in NemoClaw policy
|
|
161
|
+
nemoclaw nemo policy-add --from-file scripts/agenticros-rosbridge.policy.yaml --yes
|
|
162
|
+
|
|
163
|
+
# 5. Start RealSense + rosbridge on the host
|
|
164
|
+
./scripts/run_nemoclaw_host_stack.sh humble robot_namespace:=<NS> align_depth:=true
|
|
165
|
+
|
|
166
|
+
# 6. Restart the sandbox gateway, verify, and chat
|
|
167
|
+
nemoclaw nemo recover
|
|
168
|
+
./scripts/smoke_test_nemoclaw.sh # 6 checks; exits 0 when all green
|
|
169
|
+
nemoclaw nemo dashboard-url
|
|
170
|
+
```
|
|
171
|
+
|
|
172
|
+
Full walkthrough, troubleshooting, and a "full-embed" alternative (ROS / RealSense baked into a custom sandbox image): **[docs/nemoclaw.md](docs/nemoclaw.md)**.
|
|
173
|
+
|
|
174
|
+
## Claude + AgenticROS (MCP)
|
|
175
|
+
|
|
176
|
+
The same **AgenticROS MCP server** (`@agenticros/claude-code`) can drive the robot from **Claude Code** (terminal) or from the **Claude desktop app** on macOS (including **Claude Dispatch** on iPhone when paired to Claude on your Mac). Both use MCP; they use **different config files**.
|
|
177
|
+
|
|
178
|
+
Shared setup:
|
|
179
|
+
|
|
180
|
+
1. **Build** (from repo root): `pnpm install && pnpm build`
|
|
181
|
+
2. **AgenticROS config**: `~/.agenticros/config.json` — set `zenoh.routerEndpoint`, `robot.namespace`, `robot.cameraTopic`, etc. (see [packages/agenticros-claude-code/README.md](packages/agenticros-claude-code/README.md)).
|
|
182
|
+
3. **Zenoh**: Run `zenohd` with the remote-api plugin (e.g. port 10000) — see `scripts/zenohd-agenticros.json5` or [docs/zenoh-agenticros.md](docs/zenoh-agenticros.md).
|
|
183
|
+
|
|
184
|
+
Optional: override `robot.namespace` per MCP launch with env `**AGENTICROS_ROBOT_NAMESPACE`** (must match the robot’s topic namespace exactly; many setups use **no dashes** in the UUID segment).
|
|
185
|
+
|
|
186
|
+
### Claude Code CLI (terminal)
|
|
187
|
+
|
|
188
|
+
1. **Register MCP** (project scope, from repo root):
|
|
189
|
+
```bash
|
|
190
|
+
claude mcp add --transport stdio --scope project agenticros -- node packages/agenticros-claude-code/dist/index.js
|
|
191
|
+
```
|
|
192
|
+
Or add the server via `.mcp.json` in the repo. To avoid multiple MCP processes, run `pnpm mcp:kill` before starting a fresh `claude` session after rebuilding.
|
|
193
|
+
2. **Run**: `claude` — e.g. “List ROS2 topics”, “What do you see?”, “Publish a stop to cmd_vel.”
|
|
194
|
+
|
|
195
|
+
### Claude desktop app + Dispatch (iOS)
|
|
196
|
+
|
|
197
|
+
Claude Code stores MCP in `~/.claude.json` or project `.mcp.json`. The **Claude desktop app** uses a separate file:
|
|
198
|
+
|
|
199
|
+
- **macOS:** `~/Library/Application Support/Claude/claude_desktop_config.json`
|
|
200
|
+
- **Windows:** `%APPDATA%\Claude\claude_desktop_config.json`
|
|
201
|
+
|
|
202
|
+
1. Copy your **agenticros** MCP entry from Claude Code / `.mcp.json` into `mcpServers` in `claude_desktop_config.json`.
|
|
203
|
+
2. Use an **absolute path** to `packages/agenticros-claude-code/dist/index.js` (the desktop app’s working directory is not your repo root, so relative `node packages/...` paths will fail).
|
|
204
|
+
3. **Fully quit** the Claude desktop app (not just close the window) and reopen it. The **agenticros** tools should appear in the desktop app and in **Dispatch** when your phone is paired to Claude on the Mac.
|
|
205
|
+
|
|
206
|
+
Example `mcpServers` entry (adjust the path and namespace to your machine):
|
|
207
|
+
|
|
208
|
+
```json
|
|
209
|
+
{
|
|
210
|
+
"mcpServers": {
|
|
211
|
+
"agenticros": {
|
|
212
|
+
"command": "sh",
|
|
213
|
+
"args": [
|
|
214
|
+
"-c",
|
|
215
|
+
"node /ABSOLUTE/PATH/TO/agenticros/packages/agenticros-claude-code/dist/index.js 2>>/tmp/agenticros-mcp.log"
|
|
216
|
+
],
|
|
217
|
+
"env": {
|
|
218
|
+
"AGENTICROS_ROBOT_NAMESPACE": "robotYOUR_NAMESPACE_NO_DASHES"
|
|
219
|
+
}
|
|
220
|
+
}
|
|
221
|
+
}
|
|
222
|
+
}
|
|
223
|
+
```
|
|
224
|
+
|
|
225
|
+
Full steps, permissions (`mcp__agenticros`), and troubleshooting are in **[packages/agenticros-claude-code/README.md](packages/agenticros-claude-code/README.md)**.
|
|
226
|
+
|
|
227
|
+
## Gemini CLI
|
|
228
|
+
|
|
229
|
+
Use **Google Gemini** to chat with your robot from the terminal (same ROS2 tools as Claude Code, no MCP).
|
|
230
|
+
|
|
231
|
+
1. **Build**: `pnpm install && pnpm build`
|
|
232
|
+
2. **Config**: Same as Claude Code — `~/.agenticros/config.json` with `zenoh.routerEndpoint`, `robot.namespace`, etc.
|
|
233
|
+
3. **Run**: Set `GEMINI_API_KEY` (or `GOOGLE_API_KEY`) and run:
|
|
234
|
+
```bash
|
|
235
|
+
GEMINI_API_KEY=xxx pnpm --filter @agenticros/gemini exec agenticros-gemini "What do you see?"
|
|
236
|
+
```
|
|
237
|
+
|
|
238
|
+
See **[packages/agenticros-gemini/README.md](packages/agenticros-gemini/README.md)** for details and tested command examples (camera snapshot/description, depth distance, forward Twist, and stop).
|
|
239
|
+
|
|
240
|
+
## Memory (optional)
|
|
241
|
+
|
|
242
|
+
AgenticROS can give every adapter a **shared, persistent, cross-process** long-term memory so facts you teach the robot from one agent are immediately available in the others — Claude Desktop, Claude Code, Gemini CLI, OpenClaw chat. Off by default. Two backends:
|
|
243
|
+
|
|
244
|
+
- **`local`** — zero deps, JSON-on-disk at `~/.agenticros/memory.json`, keyword + recency search. Enable with one config flag.
|
|
245
|
+
- **`mem0`** — semantic search via the pure-Node [`mem0ai`](https://www.npmjs.com/package/mem0ai) package (`pnpm add mem0ai`); file-backed vector store at `~/.mem0/vector_store.db` (shared across all processes on the host, no server to run); embedder auto-detects Ollama (`http://localhost:11434`) → `OPENAI_API_KEY` → clear error.
|
|
246
|
+
|
|
247
|
+
When enabled, every adapter exposes four tools — `memory_remember`, `memory_recall`, `memory_forget`, `memory_status`. OpenClaw chats additionally get a system-context section that lists recently-remembered facts and instructs the LLM to call `memory_recall` before answering personal-context questions like *"what do I have for X?"* or *"what's my Y?"*.
|
|
248
|
+
|
|
249
|
+
Memory is namespaced by `robot.namespace` so adapters talking to the same robot share the same store. See **[docs/memory.md](docs/memory.md)** for ready-to-paste recipes, cross-process verification steps, and troubleshooting. OpenClaw users can also enable it from the web config UI at `/agenticros/config` (Memory section).
|
|
250
|
+
|
|
251
|
+
Quickest path to try it (fully local, no API keys):
|
|
252
|
+
|
|
253
|
+
```bash
|
|
254
|
+
pnpm add mem0ai
|
|
255
|
+
ollama pull nomic-embed-text # ~270 MB embedder model
|
|
256
|
+
```
|
|
257
|
+
|
|
258
|
+
Add `{ "memory": { "enabled": true, "backend": "mem0" } }` to `~/.agenticros/config.json` (or the OpenClaw config UI). Restart the gateway / MCP client. Then ask Claude Desktop *"remember that I have a RealSense D435i for eyes"* and ask OpenClaw *"what do I have for eyes?"* — same fact, both agents.
|
|
259
|
+
|
|
260
|
+
## Skills
|
|
261
|
+
|
|
262
|
+
AgenticROS **skills** are optional packages that add tools and behaviors to the plugin. They are loaded at gateway start.
|
|
263
|
+
|
|
264
|
+
**[AgenticROS Skills](https://github.com/agenticros/agenticros-skills)** is a curated list of skills — use it to discover skills for your robot and to submit your own via pull request.
|
|
265
|
+
|
|
266
|
+
- **Install**: In the OpenClaw config file, under `plugins.entries.agenticros.config`, set `**skillPackages`** (e.g. `["agenticros-skill-followme"]`) and ensure the package is installed where the gateway runs, or set `**skillPaths`** to directories containing skill packages. Restart the gateway after changes.
|
|
267
|
+
- **Config**: Each skill reads its options from `**config.skills.<skillId>`** (e.g. `config.skills.followme`).
|
|
268
|
+
- **Contract and creating a skill**: See **[docs/skills.md](docs/skills.md)** for the full contract, install steps, and how to build a third-party skill.
|
|
269
|
+
- **Reference skill**: **[agenticros-skill-followme](https://github.com/your-org/agenticros-skill-followme)** — Follow Me (depth + optional Ollama), with tools `follow_robot`, `follow_me_see`, and `ollama_status`. Use its README as a template for new skills.
|
|
270
|
+
|
|
271
|
+
## License
|
|
272
|
+
|
|
273
|
+
Apache-2.0
|