urua 0.99.4446 → 0.99.5004
Sign up to get free protection for your applications and to get access to all the features.
- checksums.yaml +4 -4
- data/README.md +50 -10
- data/lib/rtde.conf.xml +94 -0
- data/lib/urua.rb +89 -25
- data/server/devserver.conf +17 -0
- data/server/devserver.rb +13 -0
- data/server/uruaserver.conf +1 -1
- data/tools/urua +1 -1
- metadata +79 -8
checksums.yaml
CHANGED
|
@@ -1,7 +1,7 @@
|
|
|
1
1
|
---
|
|
2
2
|
SHA256:
|
|
3
|
-
metadata.gz:
|
|
4
|
-
data.tar.gz:
|
|
3
|
+
metadata.gz: 94ce72efcb23082b842157f2e93e065493c5654785e3fd1e992967336552b814
|
|
4
|
+
data.tar.gz: d7d7b4dac9cedd7a849120b8f8d4fe9bc8bc73b07bac9225a787fd4d29e4d673
|
|
5
5
|
SHA512:
|
|
6
|
-
metadata.gz:
|
|
7
|
-
data.tar.gz:
|
|
6
|
+
metadata.gz: f1dddcdd1e2bbd4d501b3c813d6f88d4914fbeb484aee42fffb2e8e907deb083f1eed95c681595196efb6ab87f0efb2deb946fee44f48f15417da8ea200ce494
|
|
7
|
+
data.tar.gz: d213ed840b83bb818d4b8dc49f46f0e6d560e916a2fe91418f3f020dc91ca2d758fd54fcba217c7521bae825f20e3d60d54ba74fc45faeefb1df206ebf45bc51
|
data/README.md
CHANGED
|
@@ -2,28 +2,68 @@
|
|
|
2
2
|
|
|
3
3
|
# URUA
|
|
4
4
|
|
|
5
|
-
OPC UA
|
|
5
|
+
A simple OPC UA server for Universal robots in ruby, which uses the ur-sock and opcua-smart library.
|
|
6
6
|
|
|
7
7
|
## Getting Started
|
|
8
8
|
|
|
9
|
-
A simple ruby server, which uses
|
|
9
|
+
A simple ruby server, which uses the ur-sock and opcua-smart library.
|
|
10
10
|
|
|
11
11
|
### Prerequisites & Intallation
|
|
12
12
|
|
|
13
|
-
|
|
13
|
+
For this server the OPC UA installation of the opcua-smart gem is required.
|
|
14
|
+
Please follow the instructions at https://github.com/etm/opcua-smart and install the opcua gem.
|
|
14
15
|
|
|
15
|
-
|
|
16
|
+
Additionally you have to install the URUA gem with:
|
|
17
|
+
|
|
18
|
+
```
|
|
19
|
+
gem install urua
|
|
20
|
+
```
|
|
21
|
+
|
|
22
|
+
If you want to develop or extend the server, just use the following instruction
|
|
23
|
+
```
|
|
24
|
+
git clone https://github.com/fpauker/urua
|
|
25
|
+
git clone https://github.com/fpauker/ur-sock
|
|
26
|
+
git clone https://github.com/etm/opcua-smart
|
|
16
27
|
```
|
|
17
|
-
|
|
18
|
-
|
|
28
|
+
|
|
29
|
+
Just follow the install instructions of the 3 projects.
|
|
30
|
+
After installing all packages do
|
|
31
|
+
|
|
32
|
+
```
|
|
33
|
+
cd urua/server
|
|
19
34
|
```
|
|
35
|
+
in this directory the devserver.rb and the devserver.config are located.
|
|
36
|
+
|
|
37
|
+
### Starting the server
|
|
38
|
+
|
|
39
|
+
To start the server type in the following commands:
|
|
40
|
+
|
|
41
|
+
```
|
|
42
|
+
cd urua/server
|
|
43
|
+
./uruaserver.rb start
|
|
44
|
+
```
|
|
45
|
+
or
|
|
46
|
+
```
|
|
47
|
+
cd urua/server
|
|
48
|
+
./devserver.rb start
|
|
49
|
+
```
|
|
50
|
+
to start the developing server.
|
|
51
|
+
|
|
20
52
|
|
|
21
53
|
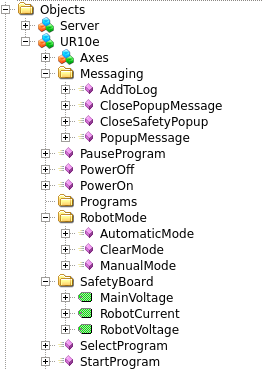
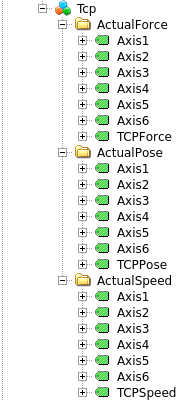
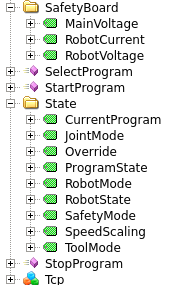
## Adress space
|
|
22
54
|
|
|
23
|
-
|
|
24
|
-
|
|
25
|
-

|
|
58
|
+
|
|
59
|
+
|
|
60
|
+
|
|
61
|
+
|
|
62
|
+
It offers several features combining 3 different interfaces of the Universal robot. It uses the
|
|
63
|
+
|
|
64
|
+
* Primary Secondary Interface for direct execution of UR scripts
|
|
65
|
+
* Dashboard server for orchestration functions e.g. starting/stopping a program
|
|
66
|
+
* RTDE interface for getting the robot states
|
|
27
67
|
|
|
28
68
|
## Contributing
|
|
29
69
|
|
data/lib/rtde.conf.xml
ADDED
|
@@ -0,0 +1,94 @@
|
|
|
1
|
+
<?xml version="1.0"?>
|
|
2
|
+
<rtde_config>
|
|
3
|
+
<recipe key="speed">
|
|
4
|
+
<field name="speed_slider_mask" type="UINT32"/>
|
|
5
|
+
<field name="speed_slider_fraction" type="DOUBLE"/>
|
|
6
|
+
</recipe>
|
|
7
|
+
|
|
8
|
+
<recipe key="out">
|
|
9
|
+
<field name="timestamp" type="DOUBLE"/>
|
|
10
|
+
<field name="target_q" type="VECTOR6D"/>
|
|
11
|
+
<field name="target_qd" type="VECTOR6D"/>
|
|
12
|
+
<field name="target_qdd" type="VECTOR6D"/>
|
|
13
|
+
<field name="target_current" type="VECTOR6D"/>
|
|
14
|
+
<field name="target_moment" type="VECTOR6D"/>
|
|
15
|
+
<field name="actual_q" type="VECTOR6D"/>
|
|
16
|
+
<field name="actual_qd" type="VECTOR6D"/>
|
|
17
|
+
<field name="actual_current" type="VECTOR6D"/>
|
|
18
|
+
<field name="joint_control_output" type="VECTOR6D"/>
|
|
19
|
+
<field name="actual_TCP_pose" type="VECTOR6D"/>
|
|
20
|
+
<field name="actual_TCP_speed" type="VECTOR6D"/>
|
|
21
|
+
<field name="actual_TCP_force" type="VECTOR6D"/>
|
|
22
|
+
<field name="target_TCP_pose" type="VECTOR6D"/>
|
|
23
|
+
<field name="target_TCP_speed" type="VECTOR6D"/>
|
|
24
|
+
<field name="actual_digital_input_bits" type="UINT64"/>
|
|
25
|
+
<field name="joint_temperatures" type="VECTOR6D"/>
|
|
26
|
+
<field name="actual_execution_time" type="DOUBLE"/>
|
|
27
|
+
<field name="robot_mode" type="INT32"/>
|
|
28
|
+
<field name="joint_mode" type="VECTOR6INT32"/>
|
|
29
|
+
<field name="safety_mode" type="INT32"/>
|
|
30
|
+
<field name="actual_tool_accelerometer" type="VECTOR3D"/>
|
|
31
|
+
<field name="speed_scaling" type="DOUBLE"/>
|
|
32
|
+
<field name="target_speed_fraction" type="DOUBLE"/>
|
|
33
|
+
<field name="actual_momentum" type="DOUBLE"/>
|
|
34
|
+
<field name="actual_main_voltage" type="DOUBLE"/>
|
|
35
|
+
<field name="actual_robot_voltage" type="DOUBLE"/>
|
|
36
|
+
<field name="actual_robot_current" type="DOUBLE"/>
|
|
37
|
+
<field name="actual_joint_voltage" type="VECTOR6D"/>
|
|
38
|
+
<field name="actual_digital_output_bits" type="UINT64"/>
|
|
39
|
+
<field name="runtime_state" type="UINT32"/>
|
|
40
|
+
|
|
41
|
+
<!-- field name="output_bit_registers0_to_31" type="UINT32"/-->
|
|
42
|
+
<!-- field name="output_bit_registers32_to_63" type="UINT32"/-->
|
|
43
|
+
|
|
44
|
+
<!-- field name="output_int_register_0" type="INT32"/-->
|
|
45
|
+
<!-- field name="output_int_register_1" type="INT32"/-->
|
|
46
|
+
<!-- field name="output_int_register_2" type="INT32"/-->
|
|
47
|
+
<!-- field name="output_int_register_3" type="INT32"/-->
|
|
48
|
+
<!-- field name="output_int_register_4" type="INT32"/-->
|
|
49
|
+
<!-- field name="output_int_register_5" type="INT32"/-->
|
|
50
|
+
<!-- field name="output_int_register_6" type="INT32"/-->
|
|
51
|
+
<!-- field name="output_int_register_7" type="INT32"/-->
|
|
52
|
+
<!-- field name="output_int_register_8" type="INT32"/-->
|
|
53
|
+
<!-- field name="output_int_register_9" type="INT32"/-->
|
|
54
|
+
<!-- field name="output_int_register_10" type="INT32"/-->
|
|
55
|
+
<!-- field name="output_int_register_11" type="INT32"/-->
|
|
56
|
+
<!-- field name="output_int_register_12" type="INT32"/-->
|
|
57
|
+
<!-- field name="output_int_register_13" type="INT32"/-->
|
|
58
|
+
<!-- field name="output_int_register_14" type="INT32"/-->
|
|
59
|
+
<!-- field name="output_int_register_15" type="INT32"/-->
|
|
60
|
+
<!-- field name="output_int_register_16" type="INT32"/-->
|
|
61
|
+
<!-- field name="output_int_register_17" type="INT32"/-->
|
|
62
|
+
<!-- field name="output_int_register_18" type="INT32"/-->
|
|
63
|
+
<!-- field name="output_int_register_19" type="INT32"/-->
|
|
64
|
+
<!-- field name="output_int_register_20" type="INT32"/-->
|
|
65
|
+
<!-- field name="output_int_register_21" type="INT32"/-->
|
|
66
|
+
<!-- field name="output_int_register_22" type="INT32"/-->
|
|
67
|
+
<!-- field name="output_int_register_23" type="INT32"/-->
|
|
68
|
+
|
|
69
|
+
<!-- field name="output_double_register_0" type="DOUBLE"/-->
|
|
70
|
+
<!-- field name="output_double_register_1" type="DOUBLE"/-->
|
|
71
|
+
<!-- field name="output_double_register_2" type="DOUBLE"/-->
|
|
72
|
+
<!-- field name="output_double_register_3" type="DOUBLE"/-->
|
|
73
|
+
<!-- field name="output_double_register_4" type="DOUBLE"/-->
|
|
74
|
+
<!-- field name="output_double_register_5" type="DOUBLE"/-->
|
|
75
|
+
<!-- field name="output_double_register_6" type="DOUBLE"/-->
|
|
76
|
+
<!-- field name="output_double_register_7" type="DOUBLE"/-->
|
|
77
|
+
<!-- field name="output_double_register_8" type="DOUBLE"/-->
|
|
78
|
+
<!-- field name="output_double_register_9" type="DOUBLE"/-->
|
|
79
|
+
<!-- field name="output_double_register_10" type="DOUBLE"/-->
|
|
80
|
+
<!-- field name="output_double_register_11" type="DOUBLE"/-->
|
|
81
|
+
<!-- field name="output_double_register_12" type="DOUBLE"/-->
|
|
82
|
+
<!-- field name="output_double_register_13" type="DOUBLE"/-->
|
|
83
|
+
<!-- field name="output_double_register_14" type="DOUBLE"/-->
|
|
84
|
+
<!-- field name="output_double_register_15" type="DOUBLE"/-->
|
|
85
|
+
<!-- field name="output_double_register_16" type="DOUBLE"/-->
|
|
86
|
+
<!-- field name="output_double_register_17" type="DOUBLE"/-->
|
|
87
|
+
<!-- field name="output_double_register_18" type="DOUBLE"/-->
|
|
88
|
+
<!-- field name="output_double_register_19" type="DOUBLE"/-->
|
|
89
|
+
<!-- field name="output_double_register_20" type="DOUBLE"/-->
|
|
90
|
+
<!-- field name="output_double_register_21" type="DOUBLE"/-->
|
|
91
|
+
<!-- field name="output_double_register_22" type="DOUBLE"/-->
|
|
92
|
+
<!-- field name="output_double_register_23" type="DOUBLE"/-->
|
|
93
|
+
</recipe>
|
|
94
|
+
</rtde_config>
|
data/lib/urua.rb
CHANGED
|
@@ -1,6 +1,10 @@
|
|
|
1
1
|
require 'daemonite'
|
|
2
2
|
require 'opcua/server'
|
|
3
|
-
|
|
3
|
+
if $dev
|
|
4
|
+
require_relative '../../ur-sock/lib/ur-sock'
|
|
5
|
+
else
|
|
6
|
+
require 'ur-sock'
|
|
7
|
+
end
|
|
4
8
|
require 'net/ssh'
|
|
5
9
|
require 'net/scp'
|
|
6
10
|
|
|
@@ -24,13 +28,17 @@ module URUA
|
|
|
24
28
|
opts['dash'] = UR::Dash.new(opts['ipadress']).connect rescue nil
|
|
25
29
|
end #}}}
|
|
26
30
|
|
|
31
|
+
def self::start_psi(opts)
|
|
32
|
+
opts['psi'] = UR::Psi.new(opts['ipadress']).connect rescue nil
|
|
33
|
+
end
|
|
34
|
+
|
|
27
35
|
def self::start_rtde(opts) #{{{
|
|
28
36
|
### Loading config file
|
|
29
37
|
conf = UR::XMLConfigFile.new opts['rtde_config']
|
|
30
38
|
output_names, output_types = conf.get_recipe opts['rtde_config_recipe_base']
|
|
31
|
-
|
|
32
39
|
opts['rtde'] = UR::Rtde.new(opts['ipadress']).connect
|
|
33
|
-
|
|
40
|
+
|
|
41
|
+
### Set Speed
|
|
34
42
|
if opts['rtde_config_recipe_speed']
|
|
35
43
|
speed_names, speed_types = conf.get_recipe opts['rtde_config_recipe_speed']
|
|
36
44
|
opts['speed'] = opts['rtde'].send_input_setup(speed_names, speed_types)
|
|
@@ -52,22 +60,34 @@ module URUA
|
|
|
52
60
|
begin
|
|
53
61
|
yield
|
|
54
62
|
rescue UR::Dash::Reconnect => e
|
|
63
|
+
puts e.message
|
|
55
64
|
tries += 1
|
|
56
65
|
if tries < 2
|
|
57
66
|
URUA::start_dash opts
|
|
58
67
|
retry
|
|
59
68
|
end
|
|
69
|
+
rescue UR::Psi::Reconnect => e
|
|
70
|
+
puts e.message
|
|
71
|
+
tries += 1
|
|
72
|
+
if tries < 2
|
|
73
|
+
URUA::start_psi opts
|
|
74
|
+
retry
|
|
75
|
+
end
|
|
60
76
|
end
|
|
61
77
|
end #}}}
|
|
62
78
|
|
|
63
79
|
def self::ssh_start(opts) #{{{
|
|
64
|
-
|
|
80
|
+
if opts['certificate']
|
|
81
|
+
opts['ssh'] = Net::SSH.start(opts['ipadress'], opts['username'], :keys => [ opts['certificate'] ])
|
|
82
|
+
else
|
|
83
|
+
opts['ssh'] = opts['password'] ? Net::SSH.start(opts['ipadress'], opts['username'], password: opts['password']) : Net::SSH.start(opts['ipadress'], opts['username'])
|
|
84
|
+
end
|
|
65
85
|
end #}}}
|
|
66
86
|
|
|
67
87
|
def self::download_program(opts,name) #{{{
|
|
68
88
|
counter = 0
|
|
69
89
|
begin
|
|
70
|
-
opts['ssh'].scp.download File.join(opts['url'],name)
|
|
90
|
+
opts['ssh'].scp.download! File.join(opts['url'],name)
|
|
71
91
|
rescue => e
|
|
72
92
|
counter += 1
|
|
73
93
|
URUA::ssh_start opts
|
|
@@ -98,9 +118,14 @@ module URUA
|
|
|
98
118
|
progs
|
|
99
119
|
end #}}}
|
|
100
120
|
|
|
121
|
+
def self::robotprogram_running?(opts)
|
|
122
|
+
opts['ps'].value == 'Playing'
|
|
123
|
+
end
|
|
124
|
+
|
|
101
125
|
def self::implementation_startup(opts) #{{{
|
|
102
126
|
opts['rtde_config'] ||= File.join(__dir__,'rtde.conf.xml')
|
|
103
127
|
opts['rtde_config_recipe_base'] ||= 'out'
|
|
128
|
+
opts['rtde_config_recipe_speed'] ||= 'speed'
|
|
104
129
|
|
|
105
130
|
Proc.new do
|
|
106
131
|
on startup do |opts|
|
|
@@ -109,6 +134,7 @@ module URUA
|
|
|
109
134
|
opts['dash'] = nil
|
|
110
135
|
opts['rtde'] = nil
|
|
111
136
|
opts['programs'] = nil
|
|
137
|
+
opts['psi'] = nil
|
|
112
138
|
|
|
113
139
|
# ProgramFile
|
|
114
140
|
opts['pf'] = opts['server'].types.add_object_type(:ProgramFile).tap{ |p|
|
|
@@ -119,10 +145,20 @@ module URUA
|
|
|
119
145
|
end
|
|
120
146
|
end
|
|
121
147
|
p.add_method :StartProgram do |node|
|
|
122
|
-
|
|
123
|
-
|
|
124
|
-
opts
|
|
125
|
-
|
|
148
|
+
unless URUA::robotprogram_running?(opts)
|
|
149
|
+
a = node.id.to_s.split('/')
|
|
150
|
+
URUA::protect_reconnect_run(opts) do
|
|
151
|
+
opts['dash'].load_program(a[-2])
|
|
152
|
+
opts['dash'].start_program
|
|
153
|
+
end
|
|
154
|
+
end
|
|
155
|
+
end
|
|
156
|
+
p.add_method :StartAsUrScript do |node|
|
|
157
|
+
unless URUA::robotprogram_running?(opts)
|
|
158
|
+
a = node.id.to_s.split('/')
|
|
159
|
+
URUA::protect_reconnect_run(opts) do
|
|
160
|
+
opts['psi'].execute_ur_script(URUA::download_program(opts, a[-2]+".script"))
|
|
161
|
+
end
|
|
126
162
|
end
|
|
127
163
|
end
|
|
128
164
|
}
|
|
@@ -145,7 +181,7 @@ module URUA
|
|
|
145
181
|
rt = opts['server'].types.add_object_type(:RobotType).tap { |r|
|
|
146
182
|
r.add_variables :SerialNumber, :RobotModel
|
|
147
183
|
r.add_object(:State, opts['server'].types.folder).tap{ |s|
|
|
148
|
-
s.add_variables :CurrentProgram, :RobotMode, :RobotState, :JointMode, :SafetyMode, :ToolMode, :ProgramState, :SpeedScaling, :Remote
|
|
184
|
+
s.add_variables :CurrentProgram, :RobotMode, :RobotState, :JointMode, :SafetyMode, :ToolMode, :ProgramState, :SpeedScaling, :Remote, :OperationalMode
|
|
149
185
|
s.add_variable_rw :Override
|
|
150
186
|
}
|
|
151
187
|
r.add_object(:SafetyBoard, opts['server'].types.folder).tap{ |r|
|
|
@@ -168,8 +204,10 @@ module URUA
|
|
|
168
204
|
end
|
|
169
205
|
end
|
|
170
206
|
r.add_method :StartProgram do
|
|
171
|
-
URUA::
|
|
172
|
-
|
|
207
|
+
unless URUA::robotprogram_running?(opts)
|
|
208
|
+
URUA::protect_reconnect_run(opts) do
|
|
209
|
+
nil unless opts['dash'].start_program
|
|
210
|
+
end
|
|
173
211
|
end
|
|
174
212
|
end
|
|
175
213
|
r.add_method :StopProgram do
|
|
@@ -182,6 +220,13 @@ module URUA
|
|
|
182
220
|
opts['dash'].pause_program
|
|
183
221
|
end
|
|
184
222
|
end
|
|
223
|
+
r.add_method :RunUrScript, content: OPCUA::TYPES::STRING do |node, content|
|
|
224
|
+
unless URUA::robotprogram_running?(opts)
|
|
225
|
+
URUA::protect_reconnect_run(opts) do
|
|
226
|
+
opts['psi'].execute_ur_script(content)
|
|
227
|
+
end
|
|
228
|
+
end
|
|
229
|
+
end
|
|
185
230
|
r.add_method :PowerOn do
|
|
186
231
|
if opts['rm'].value.to_s != 'Running'
|
|
187
232
|
Thread.new do
|
|
@@ -228,7 +273,7 @@ module URUA
|
|
|
228
273
|
}
|
|
229
274
|
### populating the adress space
|
|
230
275
|
### Robot object
|
|
231
|
-
robot = opts['server'].objects.manifest(
|
|
276
|
+
robot = opts['server'].objects.manifest(File.basename(opts['namespace']), rt)
|
|
232
277
|
|
|
233
278
|
opts['sn'] = robot.find(:SerialNumber)
|
|
234
279
|
opts['model'] = robot.find(:RobotModel)
|
|
@@ -251,6 +296,7 @@ module URUA
|
|
|
251
296
|
opts['ov'] = st.find(:Override)
|
|
252
297
|
opts['ss'] = st.find(:SpeedScaling)
|
|
253
298
|
opts['mo'] = st.find(:Remote)
|
|
299
|
+
opts['op'] = st.find(:OperationalMode)
|
|
254
300
|
|
|
255
301
|
### Axes
|
|
256
302
|
axes = robot.manifest(:Axes, ax)
|
|
@@ -286,6 +332,7 @@ module URUA
|
|
|
286
332
|
### Connecting to universal robot
|
|
287
333
|
URUA::start_rtde opts
|
|
288
334
|
URUA::start_dash opts
|
|
335
|
+
URUA::start_psi opts
|
|
289
336
|
|
|
290
337
|
### Manifest programs
|
|
291
338
|
opts['programs'] = robot.find(:Programs)
|
|
@@ -293,7 +340,7 @@ module URUA
|
|
|
293
340
|
opts['progs'] = []
|
|
294
341
|
opts['semaphore'] = Mutex.new
|
|
295
342
|
### check if interfaces are ok
|
|
296
|
-
raise if !opts['dash'] || !opts['rtde']
|
|
343
|
+
raise if !opts['dash'] || !opts['rtde'] || !opts['psi']
|
|
297
344
|
|
|
298
345
|
# Functionality for threading in loop
|
|
299
346
|
opts['doit_state'] = Time.now.to_i
|
|
@@ -303,6 +350,17 @@ module URUA
|
|
|
303
350
|
# Serious comment (we do the obvious stuff)
|
|
304
351
|
opts['sn'].value = opts['dash'].get_serial_number
|
|
305
352
|
opts['model'].value = opts['dash'].get_robot_model
|
|
353
|
+
rescue Errno::ECONNREFUSED => e
|
|
354
|
+
print 'ECONNREFUSED: '
|
|
355
|
+
puts e.message
|
|
356
|
+
rescue UR::Dash::Reconnect => e
|
|
357
|
+
URUA::start_dash opts
|
|
358
|
+
puts e.message
|
|
359
|
+
puts e.backtrace
|
|
360
|
+
rescue UR::Psi::Reconnect => e
|
|
361
|
+
URUA::start_psi opts
|
|
362
|
+
puts e.message
|
|
363
|
+
puts e.backtrace
|
|
306
364
|
rescue => e
|
|
307
365
|
puts e.message
|
|
308
366
|
puts e.backtrace
|
|
@@ -322,6 +380,7 @@ module URUA
|
|
|
322
380
|
opts['rs'].value = opts['dash'].get_program_state
|
|
323
381
|
# update remote control state from dashboard server
|
|
324
382
|
opts['mo'].value = opts['dash'].is_in_remote_control
|
|
383
|
+
opts['op'].value = opts['dash'].get_operational_mode
|
|
325
384
|
end
|
|
326
385
|
|
|
327
386
|
if Time.now.to_i - 10 > opts['doit_progs']
|
|
@@ -332,14 +391,12 @@ module URUA
|
|
|
332
391
|
# check every 10 seconds for new programs
|
|
333
392
|
progs = URUA::get_robot_programs(opts)
|
|
334
393
|
delete = opts['progs'] - progs
|
|
335
|
-
# puts 'Missing Nodes: ' + delete.to_s
|
|
336
394
|
delete.each do |d|
|
|
337
395
|
d = d[0..-5]
|
|
338
396
|
opts['prognodes'][d].delete!
|
|
339
397
|
opts['prognodes'].delete(d)
|
|
340
398
|
end
|
|
341
399
|
add = progs - opts['progs']
|
|
342
|
-
# puts 'New nodes: ' + add.to_s
|
|
343
400
|
add.each do |a|
|
|
344
401
|
a = a[0..-5]
|
|
345
402
|
opts['prognodes'][a] = opts['programs'].manifest(a, opts['pf'])
|
|
@@ -377,10 +434,14 @@ module URUA
|
|
|
377
434
|
URUA::split_vector6_data(data['actual_qd'],opts['as'], opts['asa']) # Actual TCP Speed
|
|
378
435
|
URUA::split_vector6_data(data['actual_qd'],opts['af'], opts['afa']) # Actual TCP Force
|
|
379
436
|
|
|
437
|
+
######TODO Fix Write Values that opc ua does not overwrite the speed slider mask of manual changes
|
|
380
438
|
# Write values
|
|
381
439
|
if opts['rtde_config_recipe_speed']
|
|
382
|
-
opts['
|
|
383
|
-
opts['
|
|
440
|
+
#if opts['ov'] != opts['ovold']
|
|
441
|
+
# if opts['ov'] == data['target_speed_fraction']
|
|
442
|
+
#opts['speed']['speed_slider_fraction'] = opts['ov'].value / 100.0
|
|
443
|
+
#opts['rtde'].send(opts['speed'])
|
|
444
|
+
opts['ovold'] = data['target_speed_fraction']
|
|
384
445
|
end
|
|
385
446
|
else
|
|
386
447
|
if Time.now.to_i - 10 > opts['doit_rtde']
|
|
@@ -388,18 +449,21 @@ module URUA
|
|
|
388
449
|
URUA::start_rtde opts
|
|
389
450
|
end
|
|
390
451
|
end
|
|
391
|
-
|
|
392
452
|
rescue Errno::ECONNREFUSED => e
|
|
393
|
-
|
|
453
|
+
print 'ECONNREFUSED: '
|
|
394
454
|
puts e.message
|
|
395
455
|
rescue UR::Dash::Reconnect => e
|
|
396
456
|
URUA::start_dash opts
|
|
457
|
+
puts e.message
|
|
458
|
+
puts e.backtrace
|
|
459
|
+
rescue UR::Psi::Reconnect => e
|
|
460
|
+
URUA::start_psi opts
|
|
461
|
+
puts e.message
|
|
462
|
+
puts e.backtrace
|
|
397
463
|
rescue => e
|
|
398
|
-
|
|
399
|
-
|
|
400
|
-
|
|
401
|
-
p e.message
|
|
402
|
-
p e.backtrace
|
|
464
|
+
puts e.message
|
|
465
|
+
puts e.backtrace
|
|
466
|
+
raise
|
|
403
467
|
end
|
|
404
468
|
end
|
|
405
469
|
end #}}}
|
|
@@ -0,0 +1,17 @@
|
|
|
1
|
+
### OPC UA specific config
|
|
2
|
+
### --------------------------------------------------------------------------
|
|
3
|
+
namespace: https://centurio.work/urwst51
|
|
4
|
+
|
|
5
|
+
### UR specific config
|
|
6
|
+
### --------------------------------------------------------------------------
|
|
7
|
+
ipadress: 131.130.37.204
|
|
8
|
+
username: root
|
|
9
|
+
certificate: /home/paukerf87/Projects/urua/server/devserver.rsa
|
|
10
|
+
url: /programs
|
|
11
|
+
|
|
12
|
+
### UR simulation specific config
|
|
13
|
+
### --------------------------------------------------------------------------
|
|
14
|
+
### if no password, password has to entered when server is started
|
|
15
|
+
# ipadress: localhost
|
|
16
|
+
# username: myusername
|
|
17
|
+
# url: /home/myusername/somedirectory/ursim-current/programs.UR10
|
data/server/devserver.rb
ADDED
|
@@ -0,0 +1,13 @@
|
|
|
1
|
+
#!/usr/bin/ruby
|
|
2
|
+
$dev = true
|
|
3
|
+
require_relative '../lib/urua'
|
|
4
|
+
### add stuff if necessary
|
|
5
|
+
|
|
6
|
+
Thread.abort_on_exception=true
|
|
7
|
+
|
|
8
|
+
Daemonite.new do |opts|
|
|
9
|
+
### add or replace building blocks if necessary
|
|
10
|
+
use URUA::implementation_startup(opts)
|
|
11
|
+
use URUA::implementation_run
|
|
12
|
+
use URUA::implementation_exit
|
|
13
|
+
end.loop!
|
data/server/uruaserver.conf
CHANGED
|
@@ -1,6 +1,6 @@
|
|
|
1
1
|
### OPC UA specific config
|
|
2
2
|
### --------------------------------------------------------------------------
|
|
3
|
-
namespace: https://centurio.work/
|
|
3
|
+
namespace: https://centurio.work/ur10
|
|
4
4
|
|
|
5
5
|
### UR specific config
|
|
6
6
|
### --------------------------------------------------------------------------
|
data/tools/urua
CHANGED
|
@@ -43,7 +43,7 @@ if command == 'scaffold'
|
|
|
43
43
|
dir = File.join(__dir__,'..','server')
|
|
44
44
|
FileUtils.cp(File.join(dir,'uruaserver.rb'),'.')
|
|
45
45
|
Dir[File.join(dir,'*')].each do |f|
|
|
46
|
-
unless File.exist?(File.join(__dir__,File.basename(f)))
|
|
46
|
+
unless File.exist?(File.join(__dir__,File.basename(f))) || f =~ /\/dev/
|
|
47
47
|
FileUtils.cp(f,'.')
|
|
48
48
|
end
|
|
49
49
|
end
|
metadata
CHANGED
|
@@ -1,7 +1,7 @@
|
|
|
1
1
|
--- !ruby/object:Gem::Specification
|
|
2
2
|
name: urua
|
|
3
3
|
version: !ruby/object:Gem::Version
|
|
4
|
-
version: 0.99.
|
|
4
|
+
version: 0.99.5004
|
|
5
5
|
platform: ruby
|
|
6
6
|
authors:
|
|
7
7
|
- Florian Pauker
|
|
@@ -9,7 +9,7 @@ authors:
|
|
|
9
9
|
autorequire:
|
|
10
10
|
bindir: tools
|
|
11
11
|
cert_chain: []
|
|
12
|
-
date: 2020-
|
|
12
|
+
date: 2020-09-01 00:00:00.000000000 Z
|
|
13
13
|
dependencies:
|
|
14
14
|
- !ruby/object:Gem::Dependency
|
|
15
15
|
name: opcua
|
|
@@ -29,16 +29,16 @@ dependencies:
|
|
|
29
29
|
name: ur-sock
|
|
30
30
|
requirement: !ruby/object:Gem::Requirement
|
|
31
31
|
requirements:
|
|
32
|
-
- - "
|
|
32
|
+
- - "~>"
|
|
33
33
|
- !ruby/object:Gem::Version
|
|
34
|
-
version: '0
|
|
34
|
+
version: '1.0'
|
|
35
35
|
type: :runtime
|
|
36
36
|
prerelease: false
|
|
37
37
|
version_requirements: !ruby/object:Gem::Requirement
|
|
38
38
|
requirements:
|
|
39
|
-
- - "
|
|
39
|
+
- - "~>"
|
|
40
40
|
- !ruby/object:Gem::Version
|
|
41
|
-
version: '0
|
|
41
|
+
version: '1.0'
|
|
42
42
|
- !ruby/object:Gem::Dependency
|
|
43
43
|
name: daemonite
|
|
44
44
|
requirement: !ruby/object:Gem::Requirement
|
|
@@ -46,6 +46,9 @@ dependencies:
|
|
|
46
46
|
- - "~>"
|
|
47
47
|
- !ruby/object:Gem::Version
|
|
48
48
|
version: '0.5'
|
|
49
|
+
- - ">="
|
|
50
|
+
- !ruby/object:Gem::Version
|
|
51
|
+
version: 0.5.9
|
|
49
52
|
type: :runtime
|
|
50
53
|
prerelease: false
|
|
51
54
|
version_requirements: !ruby/object:Gem::Requirement
|
|
@@ -53,8 +56,73 @@ dependencies:
|
|
|
53
56
|
- - "~>"
|
|
54
57
|
- !ruby/object:Gem::Version
|
|
55
58
|
version: '0.5'
|
|
59
|
+
- - ">="
|
|
60
|
+
- !ruby/object:Gem::Version
|
|
61
|
+
version: 0.5.9
|
|
62
|
+
- !ruby/object:Gem::Dependency
|
|
63
|
+
name: net-ssh
|
|
64
|
+
requirement: !ruby/object:Gem::Requirement
|
|
65
|
+
requirements:
|
|
66
|
+
- - "~>"
|
|
67
|
+
- !ruby/object:Gem::Version
|
|
68
|
+
version: '5.2'
|
|
69
|
+
type: :runtime
|
|
70
|
+
prerelease: false
|
|
71
|
+
version_requirements: !ruby/object:Gem::Requirement
|
|
72
|
+
requirements:
|
|
73
|
+
- - "~>"
|
|
74
|
+
- !ruby/object:Gem::Version
|
|
75
|
+
version: '5.2'
|
|
76
|
+
- !ruby/object:Gem::Dependency
|
|
77
|
+
name: net-scp
|
|
78
|
+
requirement: !ruby/object:Gem::Requirement
|
|
79
|
+
requirements:
|
|
80
|
+
- - "~>"
|
|
81
|
+
- !ruby/object:Gem::Version
|
|
82
|
+
version: '3.0'
|
|
83
|
+
type: :runtime
|
|
84
|
+
prerelease: false
|
|
85
|
+
version_requirements: !ruby/object:Gem::Requirement
|
|
86
|
+
requirements:
|
|
87
|
+
- - "~>"
|
|
88
|
+
- !ruby/object:Gem::Version
|
|
89
|
+
version: '3.0'
|
|
90
|
+
- !ruby/object:Gem::Dependency
|
|
91
|
+
name: ed25519
|
|
92
|
+
requirement: !ruby/object:Gem::Requirement
|
|
93
|
+
requirements:
|
|
94
|
+
- - "~>"
|
|
95
|
+
- !ruby/object:Gem::Version
|
|
96
|
+
version: '1'
|
|
97
|
+
- - ">="
|
|
98
|
+
- !ruby/object:Gem::Version
|
|
99
|
+
version: '1.2'
|
|
100
|
+
type: :runtime
|
|
101
|
+
prerelease: false
|
|
102
|
+
version_requirements: !ruby/object:Gem::Requirement
|
|
103
|
+
requirements:
|
|
104
|
+
- - "~>"
|
|
105
|
+
- !ruby/object:Gem::Version
|
|
106
|
+
version: '1'
|
|
107
|
+
- - ">="
|
|
108
|
+
- !ruby/object:Gem::Version
|
|
109
|
+
version: '1.2'
|
|
110
|
+
- !ruby/object:Gem::Dependency
|
|
111
|
+
name: bcrypt_pbkdf
|
|
112
|
+
requirement: !ruby/object:Gem::Requirement
|
|
113
|
+
requirements:
|
|
114
|
+
- - "~>"
|
|
115
|
+
- !ruby/object:Gem::Version
|
|
116
|
+
version: '1'
|
|
117
|
+
type: :runtime
|
|
118
|
+
prerelease: false
|
|
119
|
+
version_requirements: !ruby/object:Gem::Requirement
|
|
120
|
+
requirements:
|
|
121
|
+
- - "~>"
|
|
122
|
+
- !ruby/object:Gem::Version
|
|
123
|
+
version: '1'
|
|
56
124
|
description: OPC UA Server for Universal Robots. See https://github.com/fpauker/urua
|
|
57
|
-
email:
|
|
125
|
+
email: florian.pauker@gmail.com
|
|
58
126
|
executables:
|
|
59
127
|
- urua
|
|
60
128
|
extensions: []
|
|
@@ -65,11 +133,14 @@ files:
|
|
|
65
133
|
- LICENSE
|
|
66
134
|
- README.md
|
|
67
135
|
- Rakefile
|
|
136
|
+
- lib/rtde.conf.xml
|
|
68
137
|
- lib/urua.rb
|
|
138
|
+
- server/devserver.conf
|
|
139
|
+
- server/devserver.rb
|
|
69
140
|
- server/uruaserver.conf
|
|
70
141
|
- server/uruaserver.rb
|
|
71
142
|
- tools/urua
|
|
72
|
-
homepage:
|
|
143
|
+
homepage: https://github.com/fpauker/urua
|
|
73
144
|
licenses:
|
|
74
145
|
- GPL-3.0
|
|
75
146
|
metadata: {}
|