fastquadtree 1.2.1__tar.gz → 1.3.0__tar.gz
This diff represents the content of publicly available package versions that have been released to one of the supported registries. The information contained in this diff is provided for informational purposes only and reflects changes between package versions as they appear in their respective public registries.
Potentially problematic release.
This version of fastquadtree might be problematic. Click here for more details.
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/.github/workflows/release.yml +1 -1
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/Cargo.lock +2 -1
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/Cargo.toml +2 -1
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/PKG-INFO +7 -4
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/README.md +4 -2
- fastquadtree-1.3.0/assets/quadtree_bench_throughput.png +0 -0
- fastquadtree-1.3.0/assets/quadtree_bench_time.png +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/benchmark.md +10 -11
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/future_features.md +29 -12
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/index.md +1 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/interactive/ballpit.py +1 -1
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/mkdocs.yml +8 -5
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pyproject.toml +2 -1
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/_base_quadtree.py +21 -3
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/point_quadtree.py +21 -18
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/rect_quadtree.py +26 -19
- fastquadtree-1.3.0/src/geom.rs +73 -0
- fastquadtree-1.3.0/src/lib.rs +345 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/src/quadtree.rs +69 -49
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/src/rect_quadtree.rs +30 -28
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/insertions.rs +2 -2
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/nearest_neighbor.rs +4 -4
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/query.rs +2 -2
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/rect_quadtree.rs +3 -3
- fastquadtree-1.3.0/tests/test_point_quadtree_dtypes.py +66 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_rect_quadtree.py +65 -38
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/unconventional_bounds.rs +3 -3
- fastquadtree-1.2.1/assets/quadtree_bench_throughput.png +0 -0
- fastquadtree-1.2.1/assets/quadtree_bench_time.png +0 -0
- fastquadtree-1.2.1/src/geom.rs +0 -52
- fastquadtree-1.2.1/src/lib.rs +0 -282
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/.github/workflows/docs.yml +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/.gitignore +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/.pre-commit-config.yaml +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/LICENSE +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/assets/ballpit.png +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/assets/interactive_v2_rect_screenshot.png +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/assets/interactive_v2_screenshot.png +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/benchmark_native_vs_shim.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/benchmark_np_vs_list.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/benchmark_serialization_vs_rebuild.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/cross_library_bench.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/quadtree_bench/__init__.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/quadtree_bench/engines.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/quadtree_bench/main.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/quadtree_bench/plotting.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/quadtree_bench/runner.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/requirements.txt +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/runner.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/benchmarks/system_info_collector.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/api/point_item.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/api/pyqtree.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/api/quadtree.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/api/rect_item.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/api/rect_quadtree.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/quickstart.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/runnables.md +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/docs/styles/overrides.css +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/interactive/interactive.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/interactive/interactive_v2.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/interactive/interactive_v2_rect.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/interactive/requirements.txt +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/__init__.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/_item.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/_obj_store.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/py.typed +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/pysrc/fastquadtree/pyqtree.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/rectangle_traversal.rs +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/serialization.rs +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_base_quadtree.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_clear.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_delete.rs +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_delete_by_object.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_delete_python.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_insert_many_numpy.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_obj_store.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_point_quadtree_nn_runtime.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_pyqtree_shim_compat.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_python.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_serialization.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_unconventional_bounds.py +0 -0
- {fastquadtree-1.2.1 → fastquadtree-1.3.0}/tests/test_wrapper_edges.py +0 -0
|
@@ -1,6 +1,6 @@
|
|
|
1
1
|
[package]
|
|
2
2
|
name = "fastquadtree"
|
|
3
|
-
version = "1.
|
|
3
|
+
version = "1.3.0"
|
|
4
4
|
edition = "2021"
|
|
5
5
|
readme = "README.md"
|
|
6
6
|
|
|
@@ -13,6 +13,7 @@ smallvec = "1.15.1"
|
|
|
13
13
|
numpy = "0.26"
|
|
14
14
|
serde = { version = "1.0", features = ["derive"] }
|
|
15
15
|
bincode = {version = "2.0.1", features = ["serde"]}
|
|
16
|
+
num-traits = "0.2"
|
|
16
17
|
|
|
17
18
|
[profile.release]
|
|
18
19
|
opt-level = 3
|
|
@@ -1,6 +1,6 @@
|
|
|
1
1
|
Metadata-Version: 2.4
|
|
2
2
|
Name: fastquadtree
|
|
3
|
-
Version: 1.
|
|
3
|
+
Version: 1.3.0
|
|
4
4
|
Classifier: Programming Language :: Python :: 3
|
|
5
5
|
Classifier: Programming Language :: Python :: 3 :: Only
|
|
6
6
|
Classifier: Programming Language :: Rust
|
|
@@ -26,12 +26,13 @@ Requires-Dist: mkdocs-minify-plugin ; extra == 'dev'
|
|
|
26
26
|
Requires-Dist: maturin>=1.5 ; extra == 'dev'
|
|
27
27
|
Requires-Dist: pyqtree==1.0.0 ; extra == 'dev'
|
|
28
28
|
Requires-Dist: numpy ; extra == 'dev'
|
|
29
|
+
Requires-Dist: pre-commit ; extra == 'dev'
|
|
29
30
|
Provides-Extra: dev
|
|
30
31
|
License-File: LICENSE
|
|
31
32
|
Summary: Rust-accelerated quadtree for Python with fast inserts, range queries, and k-NN search.
|
|
32
33
|
Keywords: quadtree,spatial-index,geometry,rust,pyo3,nearest-neighbor,k-nn
|
|
33
34
|
Author: Ethan Anderson
|
|
34
|
-
Requires-Python: >=3.
|
|
35
|
+
Requires-Python: >=3.9
|
|
35
36
|
Description-Content-Type: text/markdown
|
|
36
37
|
Project-URL: Homepage, https://github.com/Elan456/fastquadtree
|
|
37
38
|
Project-URL: Repository, https://github.com/Elan456/fastquadtree
|
|
@@ -45,6 +46,8 @@ Project-URL: Issues, https://github.com/Elan456/fastquadtree/issues
|
|
|
45
46
|
|
|
46
47
|
Rust-optimized quadtree with a clean Python API
|
|
47
48
|
|
|
49
|
+
👉 **Check out the Docs:** https://elan456.github.io/fastquadtree/
|
|
50
|
+
|
|
48
51
|
[](https://pypi.org/project/fastquadtree/)
|
|
49
52
|
[](https://pypi.org/project/fastquadtree/)
|
|
50
53
|
[](https://pepy.tech/projects/fastquadtree)
|
|
@@ -64,19 +67,19 @@ Rust-optimized quadtree with a clean Python API
|
|
|
64
67
|
|
|
65
68
|
## Why use fastquadtree
|
|
66
69
|
|
|
67
|
-
- Clean [Python API](https://elan456.github.io/fastquadtree/api/quadtree/) with no external dependencies and modern typing hints
|
|
70
|
+
- Clean [Python API](https://elan456.github.io/fastquadtree/api/quadtree/) with **no external dependencies** and modern typing hints
|
|
68
71
|
- The fastest quadtree Python package ([>10x faster](https://elan456.github.io/fastquadtree/benchmark/) than pyqtree)
|
|
69
72
|
- Prebuilt wheels for Windows, macOS, and Linux
|
|
70
73
|
- Support for [inserting bounding boxes](https://elan456.github.io/fastquadtree/api/rect_quadtree/) or points
|
|
71
74
|
- Fast KNN and range queries
|
|
72
75
|
- Optional object tracking for id ↔ object mapping
|
|
73
76
|
- Fast [serialization](https://elan456.github.io/fastquadtree/benchmark/#serialization-vs-rebuild) to/from bytes
|
|
77
|
+
- Support for multiple data types (f32, f64, i32, i64) for coordinates
|
|
74
78
|
- [100% test coverage](https://codecov.io/gh/Elan456/fastquadtree) and CI on GitHub Actions
|
|
75
79
|
- Offers a drop-in [pyqtree shim](https://elan456.github.io/fastquadtree/benchmark/#pyqtree-drop-in-shim-performance-gains) that is 6.567x faster while keeping the same API
|
|
76
80
|
|
|
77
81
|
----
|
|
78
82
|
|
|
79
|
-
👉 **Docs:** https://elan456.github.io/fastquadtree/
|
|
80
83
|
|
|
81
84
|
## Examples
|
|
82
85
|
See examples of how fastquadtree can be used in the [runnables](https://elan456.github.io/fastquadtree/runnables/) section.
|
|
@@ -5,6 +5,8 @@
|
|
|
5
5
|
|
|
6
6
|
Rust-optimized quadtree with a clean Python API
|
|
7
7
|
|
|
8
|
+
👉 **Check out the Docs:** https://elan456.github.io/fastquadtree/
|
|
9
|
+
|
|
8
10
|
[](https://pypi.org/project/fastquadtree/)
|
|
9
11
|
[](https://pypi.org/project/fastquadtree/)
|
|
10
12
|
[](https://pepy.tech/projects/fastquadtree)
|
|
@@ -24,19 +26,19 @@ Rust-optimized quadtree with a clean Python API
|
|
|
24
26
|
|
|
25
27
|
## Why use fastquadtree
|
|
26
28
|
|
|
27
|
-
- Clean [Python API](https://elan456.github.io/fastquadtree/api/quadtree/) with no external dependencies and modern typing hints
|
|
29
|
+
- Clean [Python API](https://elan456.github.io/fastquadtree/api/quadtree/) with **no external dependencies** and modern typing hints
|
|
28
30
|
- The fastest quadtree Python package ([>10x faster](https://elan456.github.io/fastquadtree/benchmark/) than pyqtree)
|
|
29
31
|
- Prebuilt wheels for Windows, macOS, and Linux
|
|
30
32
|
- Support for [inserting bounding boxes](https://elan456.github.io/fastquadtree/api/rect_quadtree/) or points
|
|
31
33
|
- Fast KNN and range queries
|
|
32
34
|
- Optional object tracking for id ↔ object mapping
|
|
33
35
|
- Fast [serialization](https://elan456.github.io/fastquadtree/benchmark/#serialization-vs-rebuild) to/from bytes
|
|
36
|
+
- Support for multiple data types (f32, f64, i32, i64) for coordinates
|
|
34
37
|
- [100% test coverage](https://codecov.io/gh/Elan456/fastquadtree) and CI on GitHub Actions
|
|
35
38
|
- Offers a drop-in [pyqtree shim](https://elan456.github.io/fastquadtree/benchmark/#pyqtree-drop-in-shim-performance-gains) that is 6.567x faster while keeping the same API
|
|
36
39
|
|
|
37
40
|
----
|
|
38
41
|
|
|
39
|
-
👉 **Docs:** https://elan456.github.io/fastquadtree/
|
|
40
42
|
|
|
41
43
|
## Examples
|
|
42
44
|
See examples of how fastquadtree can be used in the [runnables](https://elan456.github.io/fastquadtree/runnables/) section.
|
|
Binary file
|
|
Binary file
|
|
@@ -11,21 +11,20 @@ Quadtrees are the focus of the benchmark, but Rtrees are included for reference.
|
|
|
11
11
|
|
|
12
12
|
|
|
13
13
|
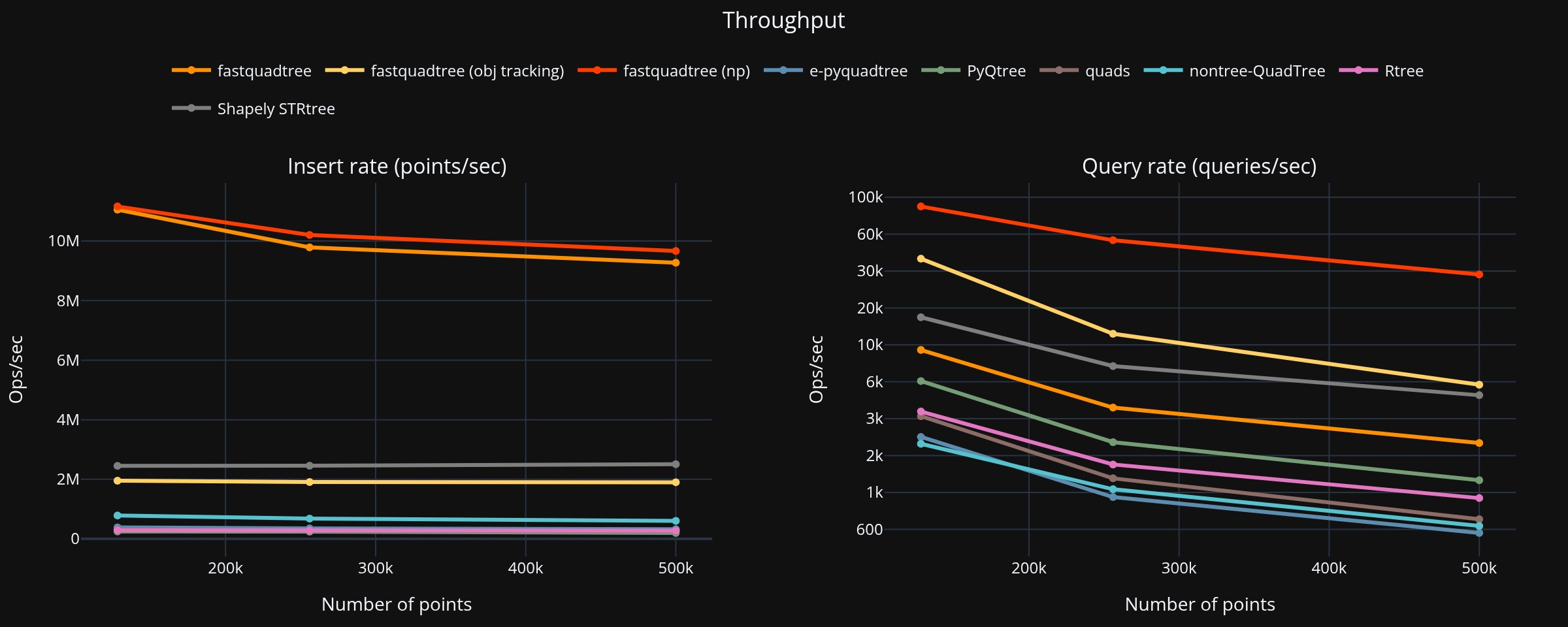
### Summary (largest dataset, PyQtree baseline)
|
|
14
|
-
|
|
15
14
|
- Points: **250,000**, Queries: **500**
|
|
16
|
-
- Fastest total: **fastquadtree** at **0.
|
|
15
|
+
- Fastest total: **fastquadtree** at **0.100 s**
|
|
17
16
|
|
|
18
17
|
| Library | Build (s) | Query (s) | Total (s) | Speed vs PyQtree |
|
|
19
18
|
|---|---:|---:|---:|---:|
|
|
20
|
-
|
|
|
21
|
-
| Shapely STRtree | 0.
|
|
22
|
-
|
|
|
23
|
-
|
|
|
24
|
-
| e-pyquadtree |
|
|
25
|
-
| PyQtree | 1.
|
|
26
|
-
| quads | 1.
|
|
27
|
-
|
|
28
|
-
|
|
19
|
+
| fastquadtree | 0.027 | 0.073 | 0.100 | 16.12× |
|
|
20
|
+
| Shapely STRtree | 0.148 | 0.083 | 0.231 | 7.00× |
|
|
21
|
+
| Rtree | 0.814 | 0.245 | 1.059 | 1.53× |
|
|
22
|
+
| nontree-QuadTree | 0.532 | 0.582 | 1.114 | 1.45× |
|
|
23
|
+
| e-pyquadtree | 0.913 | 0.641 | 1.554 | 1.04× |
|
|
24
|
+
| PyQtree | 1.352 | 0.264 | 1.616 | 1.00× |
|
|
25
|
+
| quads | 1.231 | 0.465 | 1.695 | 0.95× |
|
|
26
|
+
|
|
27
|
+
#### Benchmark Configuration
|
|
29
28
|
| Parameter | Value |
|
|
30
29
|
|---|---:|
|
|
31
30
|
| Bounds | (0, 0, 1000, 1000) |
|
|
@@ -5,26 +5,43 @@ If you really want any of these features, please let us know by opening an issue
|
|
|
5
5
|
|
|
6
6
|
If you have any suggestions or would like to contribute, please feel free to open an issue or a pull request.
|
|
7
7
|
|
|
8
|
-
|
|
8
|
+
The features will likely be implemented in the order they are listed below, but this is not guaranteed.
|
|
9
9
|
|
|
10
|
-
|
|
10
|
+
## 🚧 Planned Features
|
|
11
11
|
|
|
12
|
-
|
|
12
|
+
### 1. KNN with criteria function
|
|
13
13
|
|
|
14
|
-
|
|
14
|
+
Currently, KNN only supports finding the nearest neighbors based on euclidean distance.
|
|
15
|
+
By adding a criteria function, we could allow users to define custom criteria for finding neighbors by passing a function that
|
|
16
|
+
takes in a point and returns a score. The KNN algorithm would then use this score to determine the nearest neighbors.
|
|
17
|
+
|
|
18
|
+
### 2. KNN in rectangle quadtree
|
|
19
|
+
|
|
20
|
+
Currently, KNN is only supported in the point quadtree. By adding KNN support to the rectangle quadtree, we could allow users to find the nearest rectangles to a given point. This would be to the nearest edge of the rectangle, adding complexity to the algorithm.
|
|
21
|
+
However, it will allow for really quick collision detection between a point and a set of rectangles as the point can just do
|
|
22
|
+
robust-collision handling with the nearest rectangles.
|
|
23
|
+
|
|
24
|
+
### 3. Circle support
|
|
15
25
|
|
|
16
26
|
Currently, we support points and rectangles in two separate quadtrees.
|
|
17
27
|
For example, in the ball-pit demo, we use a point quadtree, but then query a larger area to account for the radius of the balls.
|
|
18
28
|
With a circle quadtree, we could directly insert circles and perform circle-circle collision detection.
|
|
19
29
|
|
|
20
|
-
|
|
30
|
+
A good alternative is to use the rectangle quadtree and insert the minimum bounding rectangles of the circles.
|
|
21
31
|
|
|
22
|
-
|
|
23
|
-
By adding a criteria function, we could allow users to define custom criteria for finding neighbors by passing a function that
|
|
24
|
-
takes in a point and returns a score. The KNN algorithm would then use this score to determine the nearest neighbors.
|
|
32
|
+
## ✅ Completed Planned Features
|
|
25
33
|
|
|
26
|
-
|
|
34
|
+
Once a feature from above is completed, it will be moved to this section.
|
|
27
35
|
|
|
28
|
-
|
|
29
|
-
|
|
30
|
-
|
|
36
|
+
|
|
37
|
+
### Configurable Quadtree Coordinate Type (1.3.0)
|
|
38
|
+
|
|
39
|
+
Currently, the point quadtree only uses f32 for point coordinates, limiting precision in favor of better performance.
|
|
40
|
+
To make the quadtree more flexible, we could allow users to specify the coordinate type (e.g., f64, i32, etc.) when creating a quadtree.
|
|
41
|
+
The f32 will remain the default, but users will be able to specify a different type if needed.
|
|
42
|
+
|
|
43
|
+
If the type cannot be made truly generic, then only the following types would be supported: f32, f64, i32, i64
|
|
44
|
+
|
|
45
|
+
### Quadtree serialization (1.2.0)
|
|
46
|
+
|
|
47
|
+
By serializing the quadtree, we can save its state to a file and load it later. This will allow us to persist the quadtree structure and data across sessions. For example, you could pre build a quadtree with all the walls in your video game level, serialize it to a file, and then load it when the game starts. This will heavily reduce the game load time since you won't have to rebuild the quadtree from scratch every time.
|
|
@@ -42,6 +42,7 @@
|
|
|
42
42
|
- Fast KNN and range queries
|
|
43
43
|
- Optional object tracking for id ↔ object mapping
|
|
44
44
|
- Fast [serialization](benchmark.md#serialization-vs-rebuild) to/from bytes
|
|
45
|
+
- Support for multiple data types (f32, f64, i32, i64) for coordinates
|
|
45
46
|
- [100% test coverage](https://codecov.io/gh/Elan456/fastquadtree) and CI on GitHub Actions
|
|
46
47
|
|
|
47
48
|
## Examples
|
|
@@ -12,10 +12,12 @@ theme:
|
|
|
12
12
|
- navigation.tracking
|
|
13
13
|
- navigation.indexes
|
|
14
14
|
- content.code.copy
|
|
15
|
-
- toc.
|
|
15
|
+
- toc.follow
|
|
16
16
|
- search.suggest
|
|
17
17
|
- search.highlight
|
|
18
18
|
- content.tooltips
|
|
19
|
+
- navigation.footer
|
|
20
|
+
- navigation.top
|
|
19
21
|
palette:
|
|
20
22
|
- scheme: slate
|
|
21
23
|
primary: indigo
|
|
@@ -37,13 +39,14 @@ plugins:
|
|
|
37
39
|
options:
|
|
38
40
|
docstring_style: google
|
|
39
41
|
merge_init_into_class: true
|
|
40
|
-
show_source:
|
|
42
|
+
show_source: false
|
|
41
43
|
show_root_heading: false
|
|
42
44
|
show_signature: true
|
|
43
45
|
show_if_no_docstring: true
|
|
44
|
-
separate_signature:
|
|
45
|
-
line_length:
|
|
46
|
-
heading_level:
|
|
46
|
+
separate_signature: false
|
|
47
|
+
line_length: 100
|
|
48
|
+
heading_level: 3
|
|
49
|
+
members_order: source
|
|
47
50
|
filters: # Exclude __slots__ and __len__ and anything with a single underscore prefix (don't filter insert_many even though it has a single underscore)
|
|
48
51
|
- "!__slots__"
|
|
49
52
|
- "!__len__"
|
|
@@ -8,7 +8,7 @@ name = "fastquadtree"
|
|
|
8
8
|
dynamic = ["version"]
|
|
9
9
|
description = "Rust-accelerated quadtree for Python with fast inserts, range queries, and k-NN search."
|
|
10
10
|
readme = { file = "README.md", content-type = "text/markdown" }
|
|
11
|
-
requires-python = ">=3.
|
|
11
|
+
requires-python = ">=3.9"
|
|
12
12
|
dependencies = [] # No runtime dependencies
|
|
13
13
|
license = { file = "LICENSE" }
|
|
14
14
|
authors = [{ name = "Ethan Anderson" }]
|
|
@@ -80,6 +80,7 @@ dev = [
|
|
|
80
80
|
"maturin>=1.5", # build Rust wheels
|
|
81
81
|
"pyqtree==1.0.0", # for comparison in tests
|
|
82
82
|
"numpy",
|
|
83
|
+
"pre-commit",
|
|
83
84
|
]
|
|
84
85
|
|
|
85
86
|
[tool.ruff]
|
|
@@ -18,6 +18,8 @@ from ._item import Item # base class for PointItem and RectItem
|
|
|
18
18
|
from ._obj_store import ObjStore
|
|
19
19
|
|
|
20
20
|
if TYPE_CHECKING:
|
|
21
|
+
from typing import Self # Only in Python 3.11+
|
|
22
|
+
|
|
21
23
|
from numpy.typing import NDArray
|
|
22
24
|
|
|
23
25
|
Bounds = Tuple[float, float, float, float]
|
|
@@ -46,6 +48,7 @@ class _BaseQuadTree(Generic[G, HitT, ItemType], ABC):
|
|
|
46
48
|
"_bounds",
|
|
47
49
|
"_capacity",
|
|
48
50
|
"_count",
|
|
51
|
+
"_dtype",
|
|
49
52
|
"_max_depth",
|
|
50
53
|
"_native",
|
|
51
54
|
"_next_id",
|
|
@@ -59,6 +62,10 @@ class _BaseQuadTree(Generic[G, HitT, ItemType], ABC):
|
|
|
59
62
|
def _new_native(self, bounds: Bounds, capacity: int, max_depth: int | None) -> Any:
|
|
60
63
|
"""Create the native engine instance."""
|
|
61
64
|
|
|
65
|
+
@classmethod
|
|
66
|
+
def _new_native_from_bytes(cls, data: bytes, dtype: str) -> Any:
|
|
67
|
+
"""Create the native engine instance from serialized bytes."""
|
|
68
|
+
|
|
62
69
|
@staticmethod
|
|
63
70
|
@abstractmethod
|
|
64
71
|
def _make_item(id_: int, geom: G, obj: Any | None) -> ItemType:
|
|
@@ -73,10 +80,12 @@ class _BaseQuadTree(Generic[G, HitT, ItemType], ABC):
|
|
|
73
80
|
*,
|
|
74
81
|
max_depth: int | None = None,
|
|
75
82
|
track_objects: bool = False,
|
|
83
|
+
dtype: str = "f32",
|
|
76
84
|
):
|
|
77
85
|
self._bounds = bounds
|
|
78
86
|
self._max_depth = max_depth
|
|
79
87
|
self._capacity = capacity
|
|
88
|
+
self._dtype = dtype
|
|
80
89
|
self._native = self._new_native(bounds, capacity, max_depth)
|
|
81
90
|
|
|
82
91
|
self._track_objects = bool(track_objects)
|
|
@@ -132,12 +141,13 @@ class _BaseQuadTree(Generic[G, HitT, ItemType], ABC):
|
|
|
132
141
|
return pickle.dumps(self.to_dict())
|
|
133
142
|
|
|
134
143
|
@classmethod
|
|
135
|
-
def from_bytes(cls, data: bytes) ->
|
|
144
|
+
def from_bytes(cls, data: bytes, dtype: str = "f32") -> Self:
|
|
136
145
|
"""
|
|
137
|
-
Deserialize a quadtree from bytes.
|
|
146
|
+
Deserialize a quadtree from bytes. Specifiy the dtype if the original tree that was serialized used a non-default dtype.
|
|
138
147
|
|
|
139
148
|
Args:
|
|
140
149
|
data: Bytes representing the serialized quadtree from `to_bytes()`.
|
|
150
|
+
dtype: The data type used in the native engine ('f32', 'f64', 'i32', 'i64') when saved to bytes.
|
|
141
151
|
|
|
142
152
|
Returns:
|
|
143
153
|
A new quadtree instance with the same state as when serialized.
|
|
@@ -154,7 +164,15 @@ class _BaseQuadTree(Generic[G, HitT, ItemType], ABC):
|
|
|
154
164
|
store_dict = in_dict["store"]
|
|
155
165
|
|
|
156
166
|
qt = cls.__new__(cls) # type: ignore[call-arg]
|
|
157
|
-
|
|
167
|
+
try:
|
|
168
|
+
qt._native = cls._new_native_from_bytes(core_bytes, dtype=dtype)
|
|
169
|
+
except ValueError as ve:
|
|
170
|
+
raise ValueError(
|
|
171
|
+
"Failed to deserialize quadtree native core. "
|
|
172
|
+
"This may be due to a dtype mismatch. "
|
|
173
|
+
"Ensure the dtype used in from_bytes() matches the original tree. "
|
|
174
|
+
"Error details: " + str(ve)
|
|
175
|
+
) from ve
|
|
158
176
|
|
|
159
177
|
if store_dict is not None:
|
|
160
178
|
qt._store = ObjStore.from_dict(store_dict, qt._make_item)
|
|
@@ -5,10 +5,17 @@ from typing import Any, Literal, Tuple, overload
|
|
|
5
5
|
|
|
6
6
|
from ._base_quadtree import Bounds, _BaseQuadTree
|
|
7
7
|
from ._item import Point, PointItem
|
|
8
|
-
from ._native import QuadTree as
|
|
8
|
+
from ._native import QuadTree as QuadTreeF32, QuadTreeF64, QuadTreeI32, QuadTreeI64
|
|
9
9
|
|
|
10
10
|
_IdCoord = Tuple[int, float, float]
|
|
11
11
|
|
|
12
|
+
DTYPE_MAP = {
|
|
13
|
+
"f32": QuadTreeF32,
|
|
14
|
+
"f64": QuadTreeF64,
|
|
15
|
+
"i32": QuadTreeI32,
|
|
16
|
+
"i64": QuadTreeI64,
|
|
17
|
+
}
|
|
18
|
+
|
|
12
19
|
|
|
13
20
|
class QuadTree(_BaseQuadTree[Point, _IdCoord, PointItem]):
|
|
14
21
|
"""
|
|
@@ -29,6 +36,7 @@ class QuadTree(_BaseQuadTree[Point, _IdCoord, PointItem]):
|
|
|
29
36
|
capacity: Max number of points per node before splitting.
|
|
30
37
|
max_depth: Optional max tree depth. If omitted, engine decides.
|
|
31
38
|
track_objects: Enable id <-> object mapping inside Python.
|
|
39
|
+
dtype: Data type for coordinates and ids in the native engine. Default is 'f32'. Options are 'f32', 'f64', 'i32', 'i64'.
|
|
32
40
|
|
|
33
41
|
Raises:
|
|
34
42
|
ValueError: If parameters are invalid or inserts are out of bounds.
|
|
@@ -41,26 +49,16 @@ class QuadTree(_BaseQuadTree[Point, _IdCoord, PointItem]):
|
|
|
41
49
|
*,
|
|
42
50
|
max_depth: int | None = None,
|
|
43
51
|
track_objects: bool = False,
|
|
52
|
+
dtype: str = "f32",
|
|
44
53
|
):
|
|
45
54
|
super().__init__(
|
|
46
55
|
bounds,
|
|
47
56
|
capacity,
|
|
48
57
|
max_depth=max_depth,
|
|
49
58
|
track_objects=track_objects,
|
|
59
|
+
dtype=dtype,
|
|
50
60
|
)
|
|
51
61
|
|
|
52
|
-
@classmethod
|
|
53
|
-
def from_bytes(cls, data: bytes) -> QuadTree:
|
|
54
|
-
"""
|
|
55
|
-
Create a QuadTree instance from serialized bytes.
|
|
56
|
-
|
|
57
|
-
Args:
|
|
58
|
-
data: Serialized byte data from `to_bytes()`.
|
|
59
|
-
Returns:
|
|
60
|
-
A QuadTree instance.
|
|
61
|
-
"""
|
|
62
|
-
return super().from_bytes(data)
|
|
63
|
-
|
|
64
62
|
@overload
|
|
65
63
|
def query(
|
|
66
64
|
self, rect: Bounds, *, as_items: Literal[False] = ...
|
|
@@ -160,14 +158,19 @@ class QuadTree(_BaseQuadTree[Point, _IdCoord, PointItem]):
|
|
|
160
158
|
return out
|
|
161
159
|
|
|
162
160
|
def _new_native(self, bounds: Bounds, capacity: int, max_depth: int | None) -> Any:
|
|
163
|
-
|
|
164
|
-
|
|
165
|
-
|
|
161
|
+
"""Create the native engine instance."""
|
|
162
|
+
rust_cls = DTYPE_MAP.get(self._dtype)
|
|
163
|
+
if rust_cls is None:
|
|
164
|
+
raise ValueError(f"Unsupported dtype: {self._dtype}")
|
|
165
|
+
return rust_cls(bounds, capacity, max_depth)
|
|
166
166
|
|
|
167
167
|
@classmethod
|
|
168
|
-
def _new_native_from_bytes(cls, data: bytes) -> Any:
|
|
168
|
+
def _new_native_from_bytes(cls, data: bytes, dtype: str = "f32") -> Any:
|
|
169
169
|
"""Create a new native engine instance from serialized bytes."""
|
|
170
|
-
|
|
170
|
+
rust_cls = DTYPE_MAP.get(dtype)
|
|
171
|
+
if rust_cls is None:
|
|
172
|
+
raise ValueError(f"Unsupported dtype: {dtype}")
|
|
173
|
+
return rust_cls.from_bytes(data)
|
|
171
174
|
|
|
172
175
|
@staticmethod
|
|
173
176
|
def _make_item(id_: int, geom: Point, obj: Any | None) -> PointItem:
|
|
@@ -5,10 +5,21 @@ from typing import Any, Literal, Tuple, overload
|
|
|
5
5
|
|
|
6
6
|
from ._base_quadtree import Bounds, _BaseQuadTree
|
|
7
7
|
from ._item import RectItem
|
|
8
|
-
from ._native import
|
|
8
|
+
from ._native import (
|
|
9
|
+
RectQuadTree as RectQuadTreeF32,
|
|
10
|
+
RectQuadTreeF64,
|
|
11
|
+
RectQuadTreeI32,
|
|
12
|
+
RectQuadTreeI64,
|
|
13
|
+
)
|
|
9
14
|
|
|
10
15
|
_IdRect = Tuple[int, float, float, float, float]
|
|
11
|
-
|
|
16
|
+
|
|
17
|
+
DTYPE_MAP = {
|
|
18
|
+
"f32": RectQuadTreeF32,
|
|
19
|
+
"f64": RectQuadTreeF64,
|
|
20
|
+
"i32": RectQuadTreeI32,
|
|
21
|
+
"i64": RectQuadTreeI64,
|
|
22
|
+
}
|
|
12
23
|
|
|
13
24
|
|
|
14
25
|
class RectQuadTree(_BaseQuadTree[Bounds, _IdRect, RectItem]):
|
|
@@ -30,6 +41,7 @@ class RectQuadTree(_BaseQuadTree[Bounds, _IdRect, RectItem]):
|
|
|
30
41
|
capacity: Max number of points per node before splitting.
|
|
31
42
|
max_depth: Optional max tree depth. If omitted, engine decides.
|
|
32
43
|
track_objects: Enable id <-> object mapping inside Python.
|
|
44
|
+
dtype: Data type for coordinates and ids in the native engine. Default is 'f32'. Options are 'f32', 'f64', 'i32', 'i64'.
|
|
33
45
|
|
|
34
46
|
Raises:
|
|
35
47
|
ValueError: If parameters are invalid or inserts are out of bounds.
|
|
@@ -42,26 +54,16 @@ class RectQuadTree(_BaseQuadTree[Bounds, _IdRect, RectItem]):
|
|
|
42
54
|
*,
|
|
43
55
|
max_depth: int | None = None,
|
|
44
56
|
track_objects: bool = False,
|
|
57
|
+
dtype: str = "f32",
|
|
45
58
|
):
|
|
46
59
|
super().__init__(
|
|
47
60
|
bounds,
|
|
48
61
|
capacity,
|
|
49
62
|
max_depth=max_depth,
|
|
50
63
|
track_objects=track_objects,
|
|
64
|
+
dtype=dtype,
|
|
51
65
|
)
|
|
52
66
|
|
|
53
|
-
@classmethod
|
|
54
|
-
def from_bytes(cls, data: bytes) -> RectQuadTree:
|
|
55
|
-
"""
|
|
56
|
-
Create a RectQuadTree instance from serialized bytes.
|
|
57
|
-
|
|
58
|
-
Args:
|
|
59
|
-
data: Serialized byte data from `to_bytes()`.
|
|
60
|
-
Returns:
|
|
61
|
-
A RectQuadTree instance.
|
|
62
|
-
"""
|
|
63
|
-
return super().from_bytes(data)
|
|
64
|
-
|
|
65
67
|
@overload
|
|
66
68
|
def query(
|
|
67
69
|
self, rect: Bounds, *, as_items: Literal[False] = ...
|
|
@@ -96,14 +98,19 @@ class RectQuadTree(_BaseQuadTree[Bounds, _IdRect, RectItem]):
|
|
|
96
98
|
return self._store.get_many_by_ids(self._native.query_ids(rect))
|
|
97
99
|
|
|
98
100
|
def _new_native(self, bounds: Bounds, capacity: int, max_depth: int | None) -> Any:
|
|
99
|
-
|
|
100
|
-
|
|
101
|
-
|
|
101
|
+
"""Create the native engine instance."""
|
|
102
|
+
rust_cls = DTYPE_MAP.get(self._dtype)
|
|
103
|
+
if rust_cls is None:
|
|
104
|
+
raise ValueError(f"Unsupported dtype: {self._dtype}")
|
|
105
|
+
return rust_cls(bounds, capacity, max_depth)
|
|
102
106
|
|
|
103
107
|
@classmethod
|
|
104
|
-
def _new_native_from_bytes(cls, data: bytes) -> Any:
|
|
108
|
+
def _new_native_from_bytes(cls, data: bytes, dtype: str = "f32") -> Any:
|
|
105
109
|
"""Create a new native engine instance from serialized bytes."""
|
|
106
|
-
|
|
110
|
+
rust_cls = DTYPE_MAP.get(dtype)
|
|
111
|
+
if rust_cls is None:
|
|
112
|
+
raise ValueError(f"Unsupported dtype: {dtype}")
|
|
113
|
+
return rust_cls.from_bytes(data)
|
|
107
114
|
|
|
108
115
|
@staticmethod
|
|
109
116
|
def _make_item(id_: int, geom: Bounds, obj: Any | None) -> RectItem:
|
|
@@ -0,0 +1,73 @@
|
|
|
1
|
+
use core::ops::{Add, Sub, Mul, Div};
|
|
2
|
+
use num_traits::{Zero, One};
|
|
3
|
+
use serde::{de::DeserializeOwned, Deserialize, Serialize};
|
|
4
|
+
|
|
5
|
+
// Creating a set of traits for coordinate types
|
|
6
|
+
// Requires basic arithmetic operations and ordering
|
|
7
|
+
pub trait Coord:
|
|
8
|
+
Copy + PartialOrd + Add<Output = Self> + Sub<Output = Self> + Mul<Output = Self> + Div<Output = Self> + Zero + One + Serialize + DeserializeOwned
|
|
9
|
+
{}
|
|
10
|
+
|
|
11
|
+
impl<T> Coord for T where
|
|
12
|
+
T: Copy + PartialOrd + Add<Output = Self> + Sub<Output = Self> + Mul<Output = Self> + Div<Output = Self> + Zero + One + Serialize + DeserializeOwned
|
|
13
|
+
{}
|
|
14
|
+
|
|
15
|
+
// Generic mid function for all Coord types
|
|
16
|
+
#[inline(always)]
|
|
17
|
+
pub fn mid<T: Coord>(a: T, b: T) -> T {
|
|
18
|
+
// a + (b - a) / 2
|
|
19
|
+
a + (b - a) / (T::one() + T::one()) // 1 + 1 = 2 for Div
|
|
20
|
+
}
|
|
21
|
+
|
|
22
|
+
#[derive(Copy, Clone, Debug, PartialEq, Default, Serialize, Deserialize)]
|
|
23
|
+
#[serde(bound(serialize = "", deserialize = ""))]
|
|
24
|
+
pub struct Point<T: Coord> {
|
|
25
|
+
pub x: T,
|
|
26
|
+
pub y: T,
|
|
27
|
+
}
|
|
28
|
+
|
|
29
|
+
#[derive(Copy, Clone, Debug, PartialEq, Default, Serialize, Deserialize)]
|
|
30
|
+
#[serde(bound(serialize = "", deserialize = ""))]
|
|
31
|
+
pub struct Rect<T: Coord> {
|
|
32
|
+
pub min_x: T,
|
|
33
|
+
pub min_y: T,
|
|
34
|
+
pub max_x: T,
|
|
35
|
+
pub max_y: T,
|
|
36
|
+
}
|
|
37
|
+
|
|
38
|
+
impl<T: Coord> Rect<T> {
|
|
39
|
+
pub fn contains(&self, point: &Point<T>) -> bool {
|
|
40
|
+
return point.x >= self.min_x && point.x < self.max_x && point.y >= self.min_y && point.y < self.max_y;
|
|
41
|
+
}
|
|
42
|
+
|
|
43
|
+
// Check if two Rect overlap at all
|
|
44
|
+
pub fn intersects(&self, other: &Rect<T>) -> bool {
|
|
45
|
+
return self.min_x < other.max_x && self.max_x > other.min_x && self.min_y < other.max_y && self.max_y > other.min_y
|
|
46
|
+
}
|
|
47
|
+
}
|
|
48
|
+
|
|
49
|
+
pub fn dist_sq_point_to_rect<T: Coord>(p: &Point<T>, r: &Rect<T>) -> T {
|
|
50
|
+
let dx = if p.x < r.min_x {
|
|
51
|
+
r.min_x - p.x
|
|
52
|
+
} else if p.x > r.max_x {
|
|
53
|
+
p.x - r.max_x
|
|
54
|
+
} else {
|
|
55
|
+
T::zero()
|
|
56
|
+
};
|
|
57
|
+
|
|
58
|
+
let dy = if p.y < r.min_y {
|
|
59
|
+
r.min_y - p.y
|
|
60
|
+
} else if p.y > r.max_y {
|
|
61
|
+
p.y - r.max_y
|
|
62
|
+
} else {
|
|
63
|
+
T::zero()
|
|
64
|
+
};
|
|
65
|
+
|
|
66
|
+
dx * dx + dy * dy
|
|
67
|
+
}
|
|
68
|
+
|
|
69
|
+
pub fn dist_sq_points<T: Coord>(a: &Point<T>, b: &Point<T>) -> T {
|
|
70
|
+
let dx = a.x - b.x;
|
|
71
|
+
let dy = a.y - b.y;
|
|
72
|
+
dx * dx + dy * dy
|
|
73
|
+
}
|